ElectroCraft”轮驱动,提供一流的移动机器人解决方案gydF4y2Ba

如果OEM使用精心设计的、证明组件移动平台将提供多年的服务,处理繁琐,大量有效地用最少的停机维护。gydF4y2Ba
任何工业网络连接机器人配件gydF4y2Ba

机器人需要配件工作效率。但最简单的方法将配件连接到工厂网络吗?最简单的方法是使用HMS网络的现成的Anybus产品,负责发现。gydF4y2Ba
MiniMACS6稳定Furuta摆gydF4y2Ba

工程中的一个经典问题是旋转倒立摆。它是用来证明并检查运动模式和控制算法控制和电气工程和机械工程。这些有助于控制机器人和其他机器。gydF4y2Ba
介绍了即插即用运动子系统gydF4y2Ba
如果你建立机器,你可能每天与致动器和定位阶段。但你真正获得最好的性能或从这些运动设备拥有成本最低?答案可能不是你所希望的。gydF4y2Ba
方法来改善你的IMU性能gydF4y2Ba

尽管大量的性能改进,MEMS艾莫斯用户应该意识到仍然有独特的特征。通过占这些在您的系统和良好的IMU数据实践后,你可以保证应用程序的最佳性能。gydF4y2Ba
使峰值伺服性能和热保护gydF4y2Ba
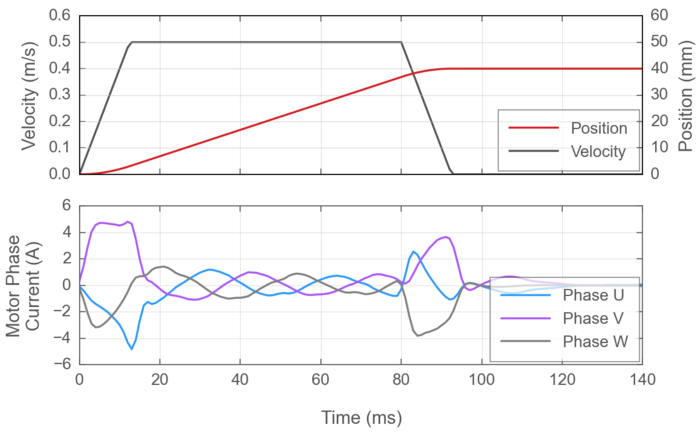
运动控制系统与无刷直流,音圈或三相直接驱动执行机构使用位置伺服控制器,在每个电机动态改变当前阶段。gydF4y2Ba
与Cortona3D问答gydF4y2Ba

Cortona3D是行之有效的技术文档的软件提供商。Cortona3D RapidAuthor,旗舰产品的一种先进的创作套件,使得公司能够轻松地创建专业和高质量的技术文档。gydF4y2Ba
映射的星星,宇宙中星系和黑洞,多亏Faulhaber汽车&系统的精度gydF4y2Ba

他们的力量转移到机器人力学通过合适的行星齿轮迷。这里使用的机器人力学是发达国家和由国会议员。集成编码器的旋转位置报告电机控制器。gydF4y2Ba
MiniMACS6稳定Furuta摆gydF4y2Ba

工程中的一个经典问题是旋转倒立摆。它是用来证明并检查运动模式和控制算法控制和电气工程和机械工程。这些有助于控制机器人和其他机器。gydF4y2Ba
传热模拟在电力电缆使用有限元方法(FEM)gydF4y2Ba
选择合适的电缆用于任何应用程序取决于许多参数。最重要的是其热抵抗最大施加电流的能力。gydF4y2Ba
前2021条——如何为您的应用程序找到合适的阻尼器gydF4y2Ba
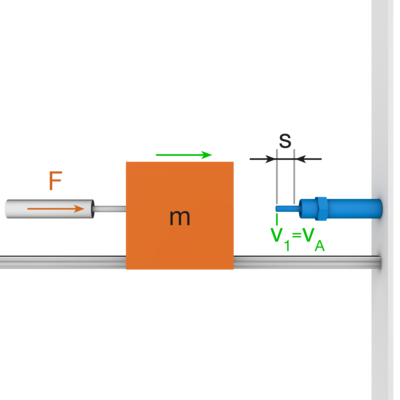
工业缓冲阻尼器振动机器。为了实现这个任务完美,有很多不同的类型。为您自己的应用程序找到合适的变体,负载情况下应该详细检查。gydF4y2Ba
真正的机器人系统的灵活性半岛app官网gydF4y2Ba

利用第三方硬件,比如机器人采摘的手臂,和软件,如定制的WMS,是至关重要的,如果你想要真正的你的机器人系统的灵活性。半岛app官网gydF4y2Ba
进化在媒体商店——聪明、基于成像工具保护冲压和成形技术gydF4y2Ba

通过数字化提高效率——几乎没有工业分支可以逃避它。也按商店的经营者越来越多网络生产。但——这并不总是必要的替换整个植物为了保持最新。gydF4y2Ba
如何选择最好的发动机摇臂机器人吗gydF4y2Ba

有一个看似无穷无尽的选择,步进和伺服电机产品在市场上,每个都有自己的优点和缺点。进入选择过程在回答一些关键问题将会大大简化选择过程。gydF4y2Ba
选择合适的编码器的机器人gydF4y2Ba

大多数机器人使用伺服电机移动关节,呼吁扶轮或角编码器。随着速度的增加,所以控制动力汽车需要,有时使振动减轻精度和分辨率同样重要。gydF4y2Ba
记录1到15的56gydF4y2Ba
下一个gydF4y2Ba|gydF4y2Ba去年gydF4y2Ba
特色产品gydF4y2Ba

施迈茨技术开发——每个任务的钳子gydF4y2Ba
为了与他们的环境和执行任务,轻量级的机器人,像所有的工业机器人,依赖于工具,在很多情况下,这些是真空夹具。这些工件的接口形式,因此决定性的整体系统的一部分。在他们的帮助下,机器人可以移动,位置,过程中,排序,堆栈和存款种类繁多的产品和组件。真空夹持系统允许特别温和处理工件,一个紧凑,节省空间的系统设计和扣人心弦的从上面。正是因为对象不需要困扰,真空吸cupenables无间隙的定位相邻。gydF4y2Ba
