紧凑、自动化镜头定位器允许外科医生查看视网膜和角膜毫不费力或颈部的压力。gydF4y2Ba
由|gydF4y2BaMicromogydF4y2Ba
眼科手术可以恢复患者的视力,但只有外科医生可以清晰地看到眼睛的内部结构。成像的角膜(前面眼睛的外表面)和视网膜(眼球后内表面)需要手术显微镜增加一个专门观察系统。这种系统可以添加多达一英寸的总高度显微镜系统,。外科医生可能会导致脖子和背部的压力,谁能每天花六到八个小时的操作。当沃尔克光学着手设计第二代时,自动版本的梅林手术观察系统,其目标是交付性能外科医生的需求最小的形式因素。一个集成micro-stepper-motor包从MICROMO(清水,FL)使它容易。gydF4y2Ba
视网膜手术的范围可以从消除玻璃体的一部分,眼球视网膜修复脱落。外科医生需要能够查看角膜之间切换和浏览视网膜。问题是,从光学的角度来看,放大与景深成反比关系。虽然手术显微镜是精密仪器,他们不能同时保持眼睛的前后在高倍镜下焦点。同时,外科医生不想担心调整显微镜的焦点,因为他或她是在一个不同的工作地点。这就是手术观察系统。gydF4y2Ba
理想的手术观察系统将提供一个高质量的视网膜图像同时占用最小的空间量低于显微镜外科医生,需要很少或没有额外的努力去使用它。通常,他们配件的标准手术显微镜。梅林,例如,位于底部的显微镜与病人的眼睛。它由两部分组成:镜头定位单元(LPU)持有手术透镜的聚光透镜装配(CLA)持有聚光透镜。手术镜头修改显微镜光学系统,视网膜图像。聚光透镜的缩短显微镜物镜的焦距约,它允许外科医生将LPU的光路,而无需移动向上和向下范围。结合在一起,这两个组件之间允许外科医生很快改变角膜的观点(没有LPU)和视网膜视图(LPU)不做任何调整显微镜。gydF4y2Ba
传统的查看系统要么是完全手册或要求外科医生使用脚踏开关将聚光透镜安装到位。的帮助下一个控制器和一个从MICROMO Precistep微型步进电机,梅林执行这个任务自动当外科医生开始摇摆LPU到位。再加上一个行业最大5毫米之间的工作空间手术镜头和眼睛,和你有一个附属的潜力大大提高外科医生经验的表现。”的设计是真正在做什么我们可以给医生尽可能多的房间虽然本质上为他们提供同样的功能和性能,他们预计,“马修·霍姆斯说,人民的眼科手术产品业务单元的经理。gydF4y2Ba

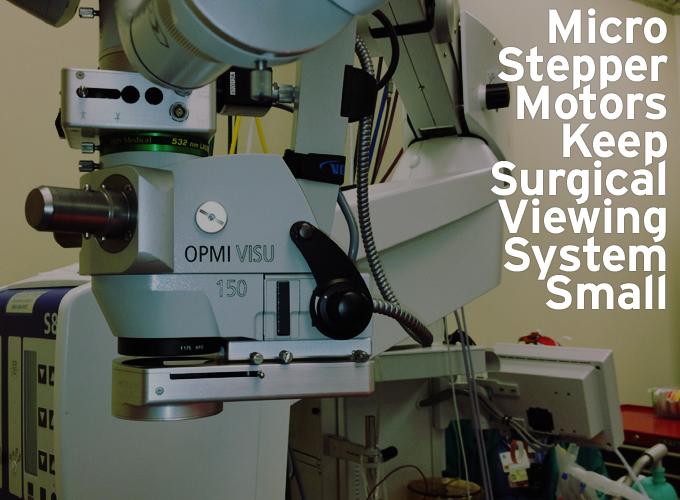
图1:梅林手术观察系统由聚光透镜装配(CLA,顶部)和镜头定位单元(LPU,底部)。当外科医生波动LPU进入手术显微镜的光学路径改变焦点从角膜到视网膜,CLA的冷凝土地自动移动到正确位置的视网膜图像没有任何调整。(由Volk光学)gydF4y2Ba
一个关键的设计团队的重点是保持深度的梅林尽可能小。“医生非常敏感显微镜的高度高于病人,”比尔哈金斯说,民族产品工程经理。“他们不希望我们改变太多。适应现有的外壳,我们真的需要一个小的汽车,我们可以把计算机迷上得到我们需要的速度和转矩。这就是MICROMO帮助我们很多。gydF4y2Ba
由于尺寸的限制,这不是可行的使用伺服电机和编码器。相反,他们选择了一个15毫米步进电机与控制器相结合。步进电机往往是高度确定性,命令一个步骤,步骤。单片机确定方向和应用翻译的脉冲数聚光透镜的光学路径。gydF4y2Ba
机电设计过程完全不简单。翻译所需的镜头比微步进电机转矩可以供应。在正常情况下的解决方案是容易得到一个更大的电动机。然而,考虑到大小限制了应用程序,不是一种选择。相反,团队增加了一个计算机迷将速度转化为足够的扭矩来移动镜头。MICROMO表达原型服务允许工程师尝试不同类型的传动装置,直到他们找到正确的解决方案。“我们正在寻找一个组合装置,可靠地工作,悄悄地,”哈金斯说。gydF4y2Ba
首先,团队尝试了金属促进计算机迷提供了一个41:1减少。接下来,他们与14:1探索一个塑料的行星减速箱减速比。“我们的主要考虑是正确的速度,并确保扭矩是足够的速度我们想要的,”哈金斯说。提供了必要的扭矩和行星减速箱也便宜,所以团队选出生产模型。gydF4y2Ba
查看系统需要执行,首先也是最重要的,但它也必须可靠。“这些都是昂贵的系统,”福尔摩斯说。“他们将会持续多年,所以整个设计需要一个健壮的。“计算机迷皮带轮和皮带传动连接实际上移动镜头马车。一个光学传感器内置的底部CLA检测LPU和控制器的位置将命令发送给步进电机。gydF4y2Ba
Volk闻名的专业知识在高质量的光学组件。公司想把手术观察系统的能力,但也想让其工程努力专注于其核心能力而不是推动其光学技术人员在机电装配成为专家。MICROMO提供一个定制的解决方案,提供一个集成的方案,不仅仅是一个电动机。“我们让他们添加一个计算机迷运动我们可以移动的速度和扭矩,我们需要它,”哈金斯说。“最近,我们要求他们添加自定义布线,所以我们可以直接购买产品,把它插进我们的董事会。“让汽车连接器已经简化了生产流程。这也符合Volt的战略重点领域中,该公司可以带来最大的价值,并让其汽车供应商的专业知识简化生产。gydF4y2Ba
现任产品相比,梅林外科医生提供更多的工作空间之间的底部查看装配和眼睛。再加上简单的操作、质量光学、最低形式因素,工程过程是成功的。梅林Volk一直积极销售自2011年夏天一个非常积极的响应来自客户和几十个系统已经部署在该领域。“我们收到的评论从每个人到目前为止,他们喜欢它,这就是他们一直在寻找多年,”福尔摩斯说。通过开发一个客户,为中心的设计和选择MICROMO机电供应合作伙伴,沃尔克为长期成功定位了梅林。gydF4y2Ba

在解决方案gydF4y2Ba
以满足尺寸和扭矩要求梅林手术观察系统,沃尔克光学产品开发团队决定增加一个变速箱的步进电机定位聚光透镜的透镜装配(CLA)。MICROMO表达原型服务允许他们尝试几种不同的类型,而无需等待很长一段时间。gydF4y2Ba
“我们有很好的结果处理MICROMO只要得到样本数量和小订单支持产品开发周期,”比尔哈金斯说,在民族产品工程经理。“有时汽车人们很难有时你喜欢当你真正想要的但我们不能得到部分与MICROMO没有问题。”gydF4y2Ba
聚光透镜的位置,梅林用途:gydF4y2Ba
- AM1524,宽15毫米,12 v步进电机提供6.0 mNm的扭矩。gydF4y2Ba
- 15,一个行星减速箱15毫米,直径提供14:1塑料减速箱减速比。gydF4y2Ba
更多的信息gydF4y2Ba梅林手术观察系统从Volk光学请点击这里gydF4y2Ba。gydF4y2Ba
更多信息在此应用程序中使用的直流电机访问MICROMO:gydF4y2Bawww.micromo.comgydF4y2Ba
内容与本文作者的意见,不一定代表RoboticsTomorrow的观点半岛app官网gydF4y2Ba

FAULHABER MICROMOgydF4y2Ba
自1961年以来,FAULHABER MICROMO与oem合作,实现高精度,高性能,定制微运动系统解决方案等市场医疗机器人与自动化在北美。半岛app官网FAULHABER MICROMO创新开始几十年前在德国的传统。的开创性发明FAULHABER空心绕组开始这一切今天市场产生数以百万计的汽车。如何FAULHABER MICROMO团队帮助你实现你的下一个创新市场第一?了解更多关于MICROMO最苛刻的应用程序的解决方案,我们的各种运动产品和技术,在线订购,工程和研发团队,洁净室组装、加工中心和其他服务在我们的清水,FL设施在https://www.faulhaber.com。gydF4y2Ba
![]()
![]()
![]()
![]()
其他文章gydF4y2Ba
微创污水改造gydF4y2Ba
汽车和骨科手术机器人运动控制技术半岛app官网gydF4y2Ba
映射的星星,宇宙中星系和黑洞,多亏Faulhaber汽车&系统的精度gydF4y2Ba
更多关于FAULHABER MICROMOgydF4y2Ba
评论(0)gydF4y2Ba
这篇文章没有任何评论。成为第一个在下面留下你的评论。gydF4y2Ba
特色产品gydF4y2Ba

