无论采用何种码垛方法,任何供应链操作的目标都是尽可能多地发货。这只能通过充分利用每个托盘上的空间来实现,即使这意味着每个托盘只多一个包装。gydF4y2Ba
 3D飞行时间相机辅助机器人码垛机gydF4y2Ba
3D飞行时间相机辅助机器人码垛机gydF4y2Ba

|的案例研究gydF4y2BaLUCID视觉实验室gydF4y2Ba
在机器人的帮助下高效装卸托盘,需要一个自动化系统来承载不同形状和大小的托盘,并在快速周期内精确和小心地处理。托盘的层不保证是平的,可能包含笨重的物体或可能倾斜到达,将层放在托盘上的斜坡上。无论采用何种码垛方法,任何供应链操作的目标都是尽可能多地发货。这只能通过充分利用每个托盘上的空间来实现,即使这意味着每个托盘只多一个包装。gydF4y2Ba
德国公司gydF4y2BaMSB DurengydF4y2Ba和gydF4y2Bacodesolo GmbH是一家gydF4y2Ba使用输送机系统,托盘需要在机器人的帮助下以结构化和精确的方式放置。为此,一个机器人操作几个托盘塔。每个塔由不同类型的托盘组成。当叉车运送新的托盘塔时,安装在机器人头上的LUCID的Helios2飞行时间摄像机会检测新的托盘塔,并测量托盘的尺寸,从20种不同的托盘格式中确定特定的类型。gydF4y2Ba
挑战gydF4y2Ba
在过去,类似的码垛系统是用激光雷达线扫描仪实现的,但这在可实现的速度上受到严重限制。使用Time-of-Flight相机的新解决方案被证明是最佳的方法,因为它的精度、分辨率和SDK,价格也很有吸引力。ToF解决方案的挑战之一是克服20多种不同类型托盘的处理,这些托盘有时在尺寸上只有轻微的差异。此外,有时托盘制造得不是很精确,或损坏程度最低。为此目的已经实现了各种逻辑链接,例如,如果主要测量值不足以明确识别,则使用其他确定的属性,直到有明确的匹配。另一个需要解决的挑战是由于托盘的材料-一些类型的托盘覆盖着半透明的塑料薄膜。这有时会导致ToF相机的3D测量值出现测量误差或“鬼数据”,与激光雷达系统相同。然而,通过将Helios2同时提供的三维测量值图像和强度图像相结合,结合逻辑链路可以实现鲁棒的可靠性。gydF4y2Ba

虽然激光雷达线扫描仪在码垛系统中受到了限制,但Helios2 3D飞行时间相机实现了所需的速度,并提供了精度、高分辨率和IP67保护,具有强大的可靠性。gydF4y2Ba
解决方案gydF4y2Ba
每当需要一个新的托盘时,Helios2 ToF摄像机就会测量所选塔的顶部托盘的确切位置,以便机器人能够精确地将该托盘从塔上抬起。即使个别托盘偏离理想的典型定位,这也是有效的。Helios2 ToF相机集成在机器人头部的夹持器结构的中心。摄像机通过一根电缆通过以太网供电(PoE)连接到运行分析软件的IPC。IPC通过第二个局域网连接与机器人和西门子PLC通信。Helios2部分用于流媒体,部分用于单幅图像模式。在这种模式下,相机最多记录32张图像,并将计算出的平均图像发送到IPC。gydF4y2Ba
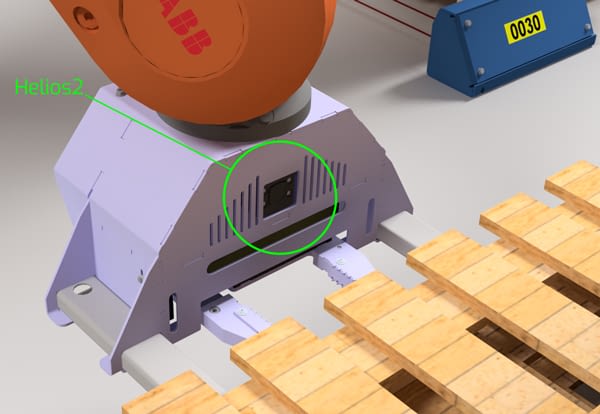
Helios2 ToF摄像头位于码垛机器人头部的夹持器结构中。gydF4y2Ba
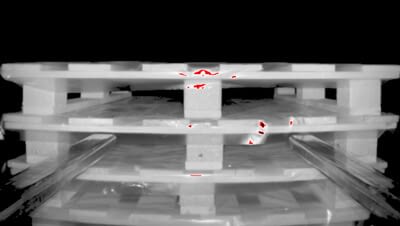
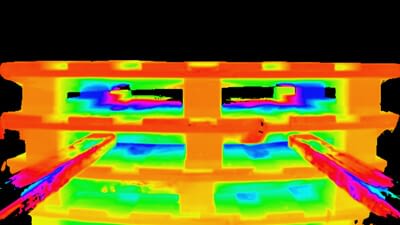
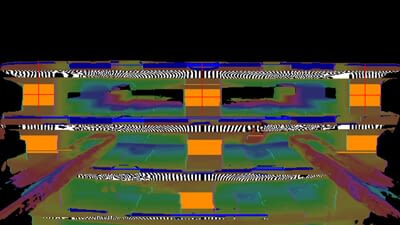
通过结合3D测量值和强度图像,可以识别和测量超过20种类型的托盘,包括半透明或反射材料覆盖的托盘。gydF4y2Ba
结论gydF4y2Ba
在此之前,托盘是手动放置在设置装置中,需要5班操作。这项工作是不合理的,也是因为一些托盘很重。通过实现自动化码垛过程和使用飞行时间摄像机,现在托盘塔的准备工作在正常轮班中完成,人工交互最小化。此外,还可以降低成本和缩短周期。经过对比测试,Helios2 Time-of-Flight相机被证明是有效装卸托盘的最佳解决方案。最重要的是精度、分辨率和SDK,而且价格诱人。gydF4y2Ba
本文的内容和观点仅为作者个人观点,并不代表robotictomorrow的观点半岛app官网gydF4y2Ba
评论(0)gydF4y2Ba
这篇文章没有任何评论。请第一个在下面留言。gydF4y2Ba
特色产品gydF4y2Ba

