有没有想过我们能够有一个准确的在线地图使用到达我们想去的任何地方?答案就在于这一过程被称为移动映射。移动映射允许用户可视化、记录和理解环境,无论他们可能。gydF4y2Ba
 与改进的移动映射系统驱动无人驾驶飞机gydF4y2Ba
与改进的移动映射系统驱动无人驾驶飞机gydF4y2Ba

案例研究从|gydF4y2Ba帕克的主gydF4y2Ba
有没有想过我们能够有一个准确的在线地图使用到达我们想去的任何地方?答案就在于这一过程被称为移动映射。移动映射允许用户可视化、记录和理解环境,无论他们可能。你可能见过车辆安装了摄像头在屋顶漫步街头。这是一种移动映射。移动映射也可以用来测量应用程序和环境、运输和公用事业的映射。gydF4y2Ba
移动测绘系统包括一个定位系统包括GNSS接收机集成惯性测量单元(IMU)。他们利用激光雷达技术,扫描仪测量能收集约1000000每秒。当结合GNSS或当使用同步定位和映射(大满贯)算法,这些地标数据点可以用来创建几乎任何环境的准确的数字地形模型。这些单位不仅限于汽车——他们可以安装到背包,直升机和无人机。gydF4y2Ba
革命性的移动映射gydF4y2Ba
Emesent Hovermap载荷可以被附加到无人机允许自主移动映射在危险的gps定位的地区。帕克的gydF4y2Ba惯性传感器gydF4y2Ba使Hovermap技术通过提供精确的方向和速度信息在一个小和轻量级的包。gydF4y2Ba
“我们有严格的要求,一个轻量级,健壮和可靠的传感器,和帕克的gydF4y2Ba惯性传感器gydF4y2Ba有良好记录的自治空间,“Emesent首席执行官Stefan Hrabar博士说。”经过两年多的测试在我们的原型,我们感到满意他们的创新的解决方案,建立了这个商业Hovermap载荷。”gydF4y2Ba
Hovermap是如何工作的?当安装一个兼容的无人机,Hovermap使用激光雷达传感器的数据,使映射和先进的自治功能。使这一切成为可能的技术是同步定位和映射(大满贯)。帕克gydF4y2Ba惯性传感器gydF4y2Ba实时援助大满贯的解决方案,因此无人机可以导航和地图空间同时,同时避免碰撞。这个过程让无人机产生精确的环境而不需要外部服务,如GPS定位,它并不总是可以无处不在。gydF4y2Ba
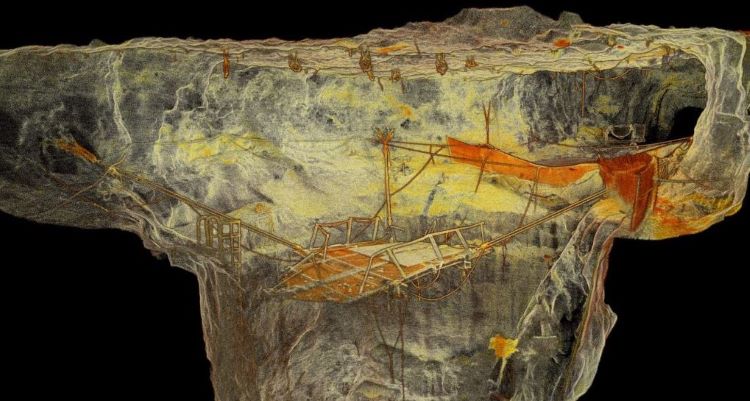
最令人印象深刻的特性之一是无人机的技术使用相同的数据收集构造图像洞穴内的洞穴来定位自己。通过使用大满贯导航和位置,这两个元素是改善——无人机依赖收集精确的数据保持在空中,这意味着他们可以在空气中停留更长时间,并最终收集更多的数据来构造更精确的洞穴系统的图像。gydF4y2Ba

无人机配备Emesent Hovermap载荷也给工人提供重大安全利益。通过消除需要人类进入陌生的地下区域完成映射工作,工人不再是预期在这些潜在危险区域工作。gydF4y2Ba
Hovermap-enabled无人机是一个重大升级传统腔监测系统(CMS),通常用于地区地下地图。CMS解决方案涉及把激光雷达的繁荣,然后插入蛀牙。虽然这使工人从地区无法访问记录激光雷达扫描人类工人,技术受限于物理约束如潮的长度和尺寸的洞穴。它还仍然需要测量员工作接近危险的地下区域。CMS扫描可以有缺失的数据区域(或阴影),扫描仪只有观点腔从一个位置。Hovermap另一方面消除阴影作为腔内的无人驾驶飞机飞来飞去,扫描从许多地方。gydF4y2Ba
“自主无人机飞行在这些具有挑战性的gps定位环境并非易事,但通过我们的高级算法成为可能,使用帕克gydF4y2Ba惯性传感器gydF4y2Ba和激光雷达实时数据。”,Emesent首席执行官Stefan Hrabar博士解释道。“这项技术是采矿和其他行业的游戏规则,提供安全和生产力有显著的好处。”gydF4y2Ba
资源gydF4y2Ba
内容与本文作者的意见,不一定代表RoboticsTomorrow的观点半岛app官网gydF4y2Ba

帕克的主——微应变传感产品gydF4y2Ba
帕克主-微应变的惯性传感产品生产工业级最小和最轻的惯性传感器可以用于先进制造、非公路用车辆、商用和军用载人和无人驾驶车辆,和土木结构。产品温度补偿采用了专有的校准过程,包括倾斜垂直参考单元,艾莫斯,明显和INS / GPS导航,稳定,移动地图,地形补偿等等。联系主额外定制设计的解决方案。gydF4y2Ba
其他文章gydF4y2Ba
方法来改善你的IMU性能gydF4y2Ba
高性能惯性传感器的机器人系统gydF4y2Ba
战术级的好处IMU在低成本GNSS / INS系统gydF4y2Ba
更多关于帕克主——微应变传感产品gydF4y2Ba
评论(0)gydF4y2Ba
这篇文章没有任何评论。成为第一个在下面留下你的评论。gydF4y2Ba
特色产品gydF4y2Ba

