在确定哪个系统适合您的应用程序时,很难可视化IMU选择对总体系统性能的影响。我们在本文中的目标是通过几个真实世界的测试来展示IMU的质量如何影响最终使用系统。gydF4y2Ba
 战术级IMU在低成本GNSS/INS系统中的优势gydF4y2Ba
战术级IMU在低成本GNSS/INS系统中的优势gydF4y2Ba

内森·米勒,大卫·罗宾斯,乔纳森·贝塞特gydF4y2BaParker LORD -微应变传感产品gydF4y2Ba
有很多低成本、基于mems的gydF4y2BaGNSS / INSgydF4y2Ba(惯性导航系统),选择一个,以满足您的要求可以是一个艰巨的任务。一般来说,GNSS/INS的GNSS侧的性能很好理解。人们不太了解的是gydF4y2BaIMUgydF4y2Ba性能特性及其对整个系统精度的影响。虽然在GNSS可用时IMU的性能仍然很重要,但在GNSS中断期间,IMU的性能至关重要,因为GNSS信号的阻碍和/或干扰很容易导致GNSS中断。在确定哪个系统适合您的应用程序时,很难可视化IMU选择对总体系统性能的影响。我们在本文中的目标是通过几个真实世界的测试来展示IMU的质量如何影响最终使用系统。gydF4y2Ba
在低成本系统中使用的imu被分类为以下等级之一:消费级、工业级或战术级。通常,成本是IMU使用的陀螺仪质量的函数。最近MEMS陀螺仪技术的成本降低基本上已经使消费级系统过时,留下工业或战术级作为新设计的决策点。战术级和工业级的界限很难界定,但一个普遍接受的定义是,陀螺仪运行中偏置稳定性(IRBS)低于5度/小时的IMU是战术级;而较高的IRBS则是工业级。为了完整起见,消费级陀螺仪通常具有30度/小时或更高的IRBS。gydF4y2Ba
陀螺运行中的偏置稳定性是通过IEEE-STD-952-1997中描述的Allan方差法计算的,它代表了陀螺偏置随时间的随机变化。这个参数如此重要的原因是开机偏置通常是估计的,并且在设备上电时很大程度上去除,但是运行中的偏置变化在运行期间持续影响设备,因此限制了其性能。在GNSS中断期间,这种变化是综合的,导致估计方向的误差。然后利用这个错误的方向将固定物体的加速度转换为全局框架,将其集成以更新速度,并再次集成以更新位置。通过这种效应,很明显,估计方向的任何误差都会对估计位置的准确性产生巨大影响。gydF4y2Ba

为了展示IMU等级对系统性能的实际影响,我们使用我们最流行的两种GNSS/INS系统进行了一系列4次测试gydF4y2Ba3 dmgq7gydF4y2Ba和gydF4y2Ba3 dmgx5gydF4y2Ba.GQ7是我们最新的GNSS/INS,具有rtk级别的位置精度~2cm,战术级IMU具有<2.0度/小时的运行陀螺偏差稳定性。GX5是我们的上一代产品,单点GNSS定位精度为1.5m,具有8度/小时运行偏置稳定性的工业级IMU。进行了以下测试:gydF4y2Ba
工业标准艾伦方差检验gydF4y2Ba
固定式陀螺集成试验gydF4y2Ba
真实世界的GQ7数据与后处理模拟进行比较,在诱导GNSS中断期间,真实世界的GX5 IMU数据取代了GQ7 IMU数据gydF4y2Ba
现实世界中,GX5和GQ7在诱导GNSS中断期间的正面比较gydF4y2Ba
检验1 -艾伦方差gydF4y2Ba
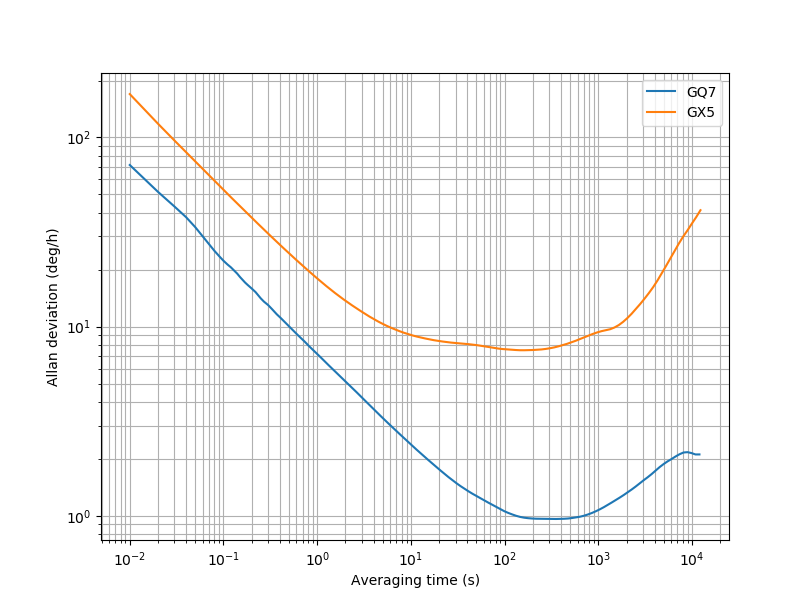
如前所述,在IEEE-STD-952-1997中描述了陀螺仪的Allan方差测试。我们的测试是在一个非常重的花岗岩块上进行的,它与建筑振动隔绝。IMU测试单元通电,并允许在环境条件下热稳定两个小时;然后,收集12小时的惯性数据。两个传感器的Allan偏差(Allan方差的平方根)图gydF4y2Ba3 dmgx5gydF4y2Ba和一个gydF4y2Ba3 dmgq7gydF4y2Ba,如下图1所示。每个器件的运行中偏置稳定性可以从该图中推断出来,并对应于曲线的最小Allan偏差。从GX5图中可以看出,这发生在~7.5度/小时,相关时间(x轴值)为~175秒。对于GQ7,这发生在~0.9度/小时,相关时间为~300秒。从这些结果可以清楚地看出,GQ7可以归类为战术级IMU;而GX5却不能。gydF4y2Ba
图1 - GQ7和GX5陀螺仪Allan方差。gydF4y2Ba
每条曲线表示三个设备轴上的平均值。gydF4y2Ba
测试2 -固定陀螺集成gydF4y2Ba
艾伦方差检验的局限性之一是它不能解释现实世界的情况。这是经过设计的,因为确保不同设备之间相似的测试条件可以进行更公平的比较。为了解决这个问题,我们进行的下一个测试是确定GQ7和GX5陀螺仪在放置在相对良性但现实的环境中时随时间的角漂移。为了进行这项测试,两个设备都用VHB胶带牢固地固定在桌面上。测试是在平均办公环境的环境温度下进行的,两个设备都受到建筑物和地板振动的影响。热问题没有得到解决,也没有进行热浸泡。陀螺仪δ θ(积分角速率)在100 Hz下从两个设备采集20分钟,并使用Matlab进行后处理。使用记录数据的前5秒的平均值来减轻开启偏差。这类似于执行陀螺仪偏差捕获或实时估计陀螺仪偏差。原始delta theta数据被用来代替实时卡尔曼滤波姿态信息,以消除辅助传感器测量的影响,并过滤两个设备之间的差异。 With the turn-on bias removed, the data was integrated for each gyro axis.
下面的图2显示了在测试过程中对传感器产生的非理想振动。gydF4y2Ba
图3显示了GQ7在每个陀螺仪轴上的漂移作为时间的函数。gydF4y2Ba
图4显示了GX5在每个陀螺仪轴上的漂移作为时间的函数。gydF4y2Ba
图2 -静止测试时GX5测量的加速度gydF4y2Ba

图3 -集成GQ7陀螺仪数据在20分钟内的漂移gydF4y2Ba
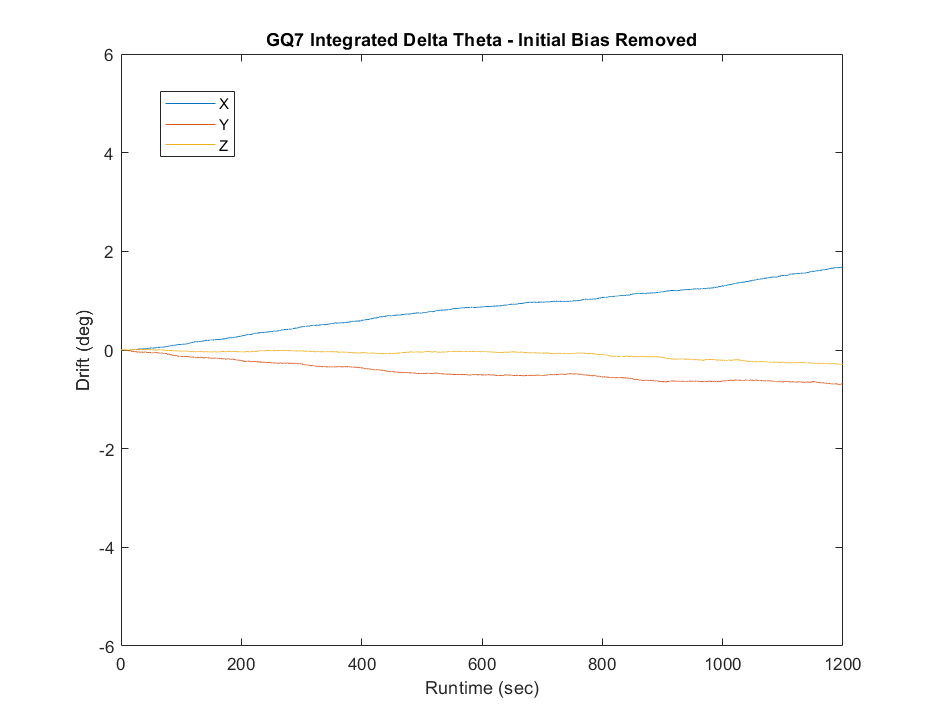
图4 -集成GX5陀螺仪数据在20分钟内的漂移gydF4y2Ba

从这些图中可以清楚地看出,较低的陀螺偏置不稳定性实际上与较低的姿态误差和漂移尺度相关,正如人们所期望的那样,因为GQ7比GX5小~3-4倍。不太明显的是,为什么在20分钟内的漂移似乎比艾伦方差所预期的要高。这就是除了运行中偏差稳定性之外的其他误差源发挥作用的地方。如前所述,初始偏差仅使用前5秒的数据进行估计。这些估计值与实际的开启偏差有很小的偏差,但不是零,这是在整个收集时间内集成的。此外,不太严重的误差源也会起作用,例如振动纠偏误差,它具有g^2效应。这些小的、非零的错误在长时间集成时也会产生合理的影响。gydF4y2Ba
测试3 -在诱导GNSS中断期间,使用GX5 IMU数据的后处理模拟与真实GQ7数据进行比较gydF4y2Ba
大多数GNSS/INS系统不在办公室台式机或实验室花岗岩块上使用;因此,真实世界的测试数据是有价值的。用于该测试的数据是在一辆配备了多个GNSS/INS系统以及用于诱导GNSS中断的射频衰减器的仪器悍马中收集的(图5)。其中一个GNSS/INS系统是用作参考系统的高精度单元。gydF4y2Ba
在当地进行了一次驱动器,同时记录了参考单元、GX5和GQ7的数据。参考单元和GQ7处理RTK校正,并使用射频衰减器同时人工诱导GX5和GQ7上的GNSS中断。为了显示战术级IMU与工业级IMU的真实效果,进行了收集后的模拟,用GX5的IMU数据代替GQ7的IMU数据。这是一种有效的方法,因为两个系统都有精确的gps时间戳IMU数据,并且之前的模拟已经针对无数的实时数据集进行了验证。图6显示了30秒GNSS中断期间卡尔曼滤波器估计位置轨迹的差异。图7显示了在30秒停机期间,战术级和工业级IMU相对于参考单元的水平位置误差。比较这两张图,你可能会问为什么工业级IMU的水平位置误差似乎比地图上两条轨道之间的距离要高。重要的是要注意,沿轨道(行进方向)的误差很难从二维图中辨别出来。在“GNSS信号恢复开始”事件之后,由于滤波器试图回溯到重新获得的GNSS位置测量值,因此对该误差的滤波器校正是明显的。gydF4y2Ba
图5 -安装了GQ7、GX5和高精度参考装置的测试车辆。gydF4y2Ba


图6 - GNSS中断期间报告的位置轨迹-战术与工业级imu(为清晰起见,地图视图中未标记停车场,显示航拍图)gydF4y2Ba

图7 - GNSS中断30秒期间的水平位置误差gydF4y2Ba
测试4 -在诱导GNSS中断期间,GX5和GQ7在真实世界中进行正面比较gydF4y2Ba
后处理和模拟数据可能表明可能发生了一些棘手的业务(实际上没有),所以让我们来看看正面比较。为了获得这些数据,使用了相同的悍马测试系统,在射频衰减器导致GNSS中断的局部地区收集数据。分析直接比较测试数据的困难之一是,并非两个设备之间的所有性能差异都可以单独归因于IMU性能的差异。被测设备具有不同的GNSS子模块、不同的GNSS处理路径(松耦合与紧耦合)和不同的卡尔曼滤波器架构。话虽如此,这个测试是为了完整性,但应该说明的是,测试3实际上是单独比较IMU效果的金标准。gydF4y2Ba
如图8所示,在30秒的停机期间,GQ7的性能优于GX5。值得注意的是,在本次测试中,算法辅助功能(如轮式车辆约束和零速度更新)被关闭,以保持两个单元之间的卡尔曼滤波器估计尽可能相似,并减少任何算法引起的有益影响。图9显示了GQ7和GX5相对于参考单元的水平位置误差。很明显,GQ7的表现远远优于GX5在这个特殊的机动。gydF4y2Ba

图8 - GNSS中断期间报告的位置轨迹- GQ7与GX5gydF4y2Ba
图9 - GNSS中断30秒期间的水平位置误差gydF4y2Ba

总结gydF4y2Ba
很明显,拥有战术级IMU确实能够提高导航性能,而投资于更高性能的IMU也确实能够带来益处。最近MEMS传感器技术的进步使得战术级imu进入了低成本GNSS/INS系统的领域,这些系统正在获得与更昂贵的前辈相比的吸引力。此外,我们还展示了从标准化测试一直到实际车辆测试的进展,以及人们通常如何期望IMU数据表性能指标在现实世界中影响他们的系统。gydF4y2Ba
本文的内容和观点是作者的,并不一定代表roboticstomorow的观点半岛app官网gydF4y2Ba

Parker LORD -微应变传感产品gydF4y2Ba
Parker LORD - MicroStrain惯性传感产品公司生产最小和最轻的工业级惯性传感器,可用于先进制造,非公路车辆,商用和军用载人和无人驾驶车辆以及民用结构。产品采用专有的校准过程进行温度补偿,包括倾角计、垂直参考单元、imu、AHRS和用于导航、稳定、移动测绘、地形补偿等的INS/GPS。联系LORD更多定制设计的解决方案。gydF4y2Ba
其他文章gydF4y2Ba
提高IMU性能的方法gydF4y2Ba
用改进的移动地图系统驱动无人机gydF4y2Ba
机器人系统的高性能惯性传感器gydF4y2Ba
更多关于派克LORD -微应变传感产品gydF4y2Ba
评论(0)gydF4y2Ba
这篇文章没有任何评论。请第一个在下面留言。gydF4y2Ba
特色产品gydF4y2Ba

