当确定哪些系统为应用程序是正确的,很难想象IMU选择对整个系统性能的影响。我们本文的目标是展示IMU的质量影响到最终使用系统通过几个实际的测试。gydF4y2Ba
 战术级的好处IMU在低成本GNSS / INS系统gydF4y2Ba
战术级的好处IMU在低成本GNSS / INS系统gydF4y2Ba

内森•米勒,大卫•罗宾斯乔纳森Bessette |gydF4y2Ba帕克的主——微应变传感产品gydF4y2Ba
有广泛的低成本、MEMS-basedgydF4y2BaGNSS / INSgydF4y2Ba(惯性导航系统)在当今市场上,选择一个满足您的要求可能是压倒性的任务。GNSS-side GNSS / INS的性能通常是很好理解的。不理解的是gydF4y2BaIMUgydF4y2Ba性能特征及其对总体系统精度的影响。虽然仍然重要当GNSS可用,IMU在GNSS中断性能是至关重要的,这很容易遇到由于疲软的阻挠和/或干扰GNSS信号。当确定哪些系统为应用程序是正确的,很难想象IMU选择对整个系统性能的影响。我们本文的目标是展示IMU的质量影响到最终使用系统通过几个实际的测试。gydF4y2Ba
艾莫斯用于低成本系统分为下列成绩之一:消费、工业、或战术。一般来说,成本尺度的函数使用的陀螺仪IMU的质量。最近的MEMS陀螺技术降低成本本质上是由消费级系统过时了,离开工业或战术级作为新设计的决策点。战术和技术等级的划分可以很难确定,但一个普遍接受的定义是一个IMU与陀螺仪在运行偏差小于5度的稳定(irb) /人力资源战术级;然而,更高的irb工业品位。出于完整性的考虑,消费者品位陀螺一般会由30度/小时或更多。gydF4y2Ba
陀螺在运行通过阿伦方差偏置稳定性计算方法中描述的ieee - std - 952 - 1997和代表陀螺的随机变化的偏见。这个参数是至关重要的原因是刺激偏见通常估计,很大程度上删除设备上电,但在运行偏差变化不断影响设备在运行时,因此,限制了其性能。GNSS停机期间,这个变化是集成,导致误差估计的方向。这一错误取向是用于将物体固定加速全球框架,整合更新速度和集成再次更新的位置。通过这种效果,很明显,任何错误的估计取向有着戏剧性的影响估计位置的准确性。gydF4y2Ba

为了展示真实的IMU年级对系统性能的影响,进行了一系列的4测试使用我们最受欢迎的两个GNSS / INS系统:gydF4y2Ba3 dmgq7gydF4y2Ba和gydF4y2Ba3 dmgx5gydF4y2Ba。GQ7是我们最新GNSS / INS RTK-level ~ 2厘米的位置精度和tactical-grade IMU与< 2.0度/人力资源在运行陀螺稳定的偏见。GX5是我们的上一代产品单点GNSS定位精度为1.5 m和8度的工业级IMU /人力资源在运行偏差的稳定性。进行了以下测试:gydF4y2Ba
行业标准阿伦方差检验gydF4y2Ba
静止的陀螺集成测试gydF4y2Ba
现实世界GQ7数据进行后期处理相比,模拟现实世界GX5 IMU数据取代了GQ7 IMU数据在一个诱导GNSS停机gydF4y2Ba
实际,详细比较GX5和GQ7在诱导GNSS停机gydF4y2Ba
测试1 -阿伦方差gydF4y2Ba
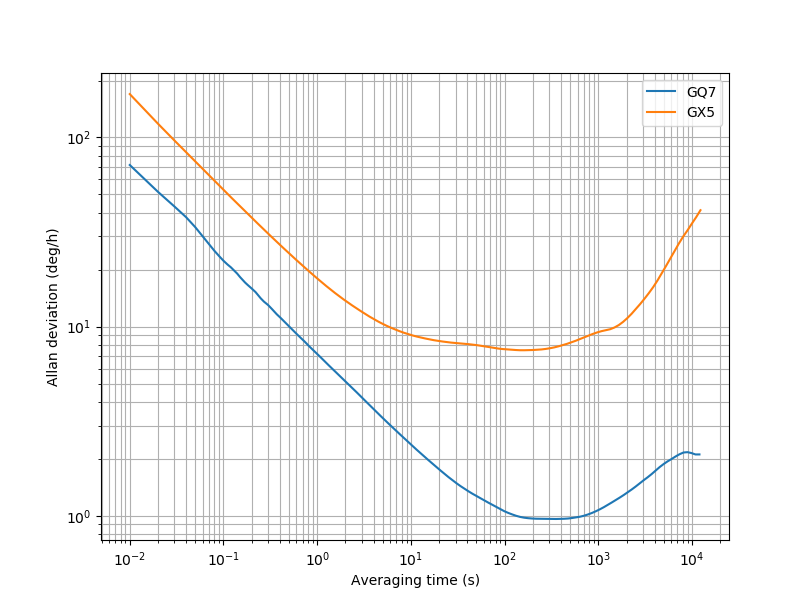
如前所述,阿伦方差检测陀螺中描述ieee - std - 952 - 1997。我们的测试是进行一个非常沉重的花岗岩块机械与建筑的振动。乌兹别克斯坦伊斯兰运动测试单位是动力,允许热稳定的两个小时在环境条件;然后,惯性数据收集了12个小时的时间。艾伦偏差(Allan方差的平方根)情节有两个传感器,一个gydF4y2Ba3 dmgx5gydF4y2Ba和一个gydF4y2Ba3 dmgq7gydF4y2Ba下面的图1所示。在运行偏置稳定性为每个设备可以推断出从这个情节,和对应于最低艾伦偏差的曲线。GX5图中可以看到,这发生在~ 7.5度/人力资源相关时间(轴值)~ 175秒。GQ7,这发生在~ 0.9度/人力资源的相关时间~ 300秒。从这些结果很明显,GQ7可分为tactical-grade IMU;然而,GX5不能。gydF4y2Ba
图1 - GQ7和GX5陀螺阿伦方差。gydF4y2Ba
平均每个曲线代表三个设备的轴。gydF4y2Ba
测试2 -静止的陀螺集成gydF4y2Ba
阿伦方差测试的局限性之一是它不考虑现实世界的情况。这是通过设计,确保类似的测试条件不同设备创建公平的比较。为了解决这个问题,我们进行下一个测试来确定GQ7和GX5陀螺的角漂移时放置在一个相对良性的,然而,现实的环境。执行这个测试,设备都安全地固定在桌面使用VHB胶带。测试是在环境温度下进行平均办公环境和设备都是建筑和地板振动。热问题没有解决,和热浸没有执行。陀螺δθ(集成角速率)收集在100 Hz 20分钟使用Matlab从设备和后期处理。刺激偏见减轻使用前5秒的记录数据的平均值。这类似于执行一个陀螺偏差实时捕获或估计陀螺的偏见。使用原始的δθ数据不是实时卡尔曼滤波器的态度信息协助去除的影响传感器测量和过滤两个设备之间的差异。 With the turn-on bias removed, the data was integrated for each gyro axis.
下面的图2显示了理想振动感应传感器在测试期间。gydF4y2Ba
图3显示了在每个陀螺漂移GQ7轴作为时间的函数。gydF4y2Ba
图4显示了在每个陀螺漂移GX5轴作为时间的函数。gydF4y2Ba
图2 -固定测试期间GX5加速度测量gydF4y2Ba

图3——在集成GQ7陀螺漂移数据超过20分钟gydF4y2Ba
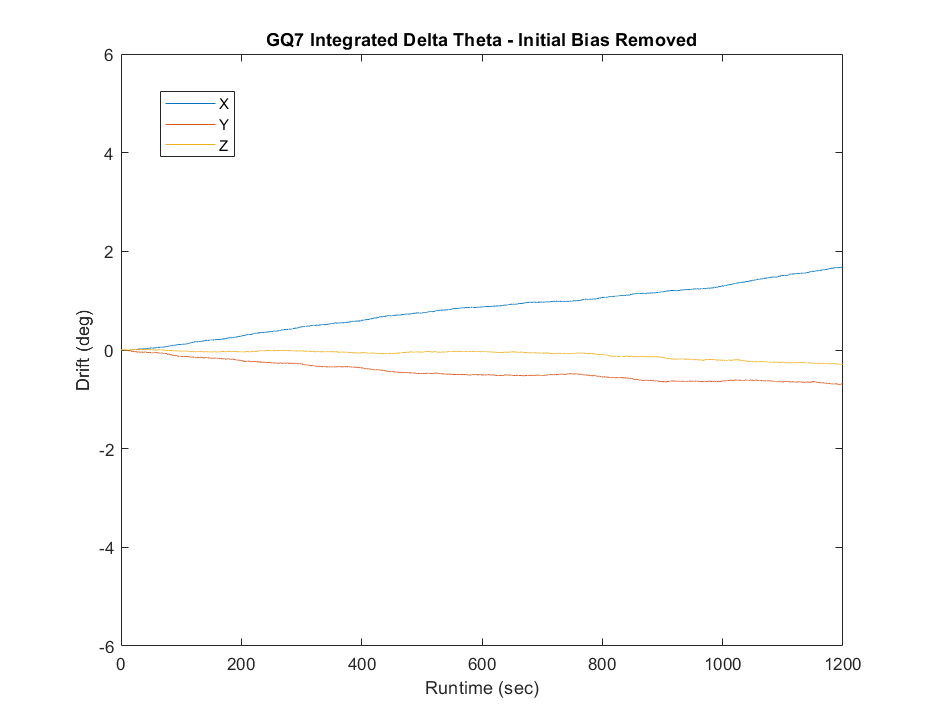
图4 -在集成GX5陀螺漂移数据超过20分钟gydF4y2Ba

从这些情节很明显降低陀螺偏见不稳定实际上与姿态误差和漂移低尺度正如预期的那样,随着GQ7小于GX5 ~ 3 - 4倍。不太明显的就是为什么漂移似乎比预期更高的20分钟期间阿伦方差。这就是额外的误差来源,在运行偏差以外的稳定,发挥作用。如前所述,最初的偏差估计只使用第一个5秒的数据。这些评估将由一个小,但不为零,从真正的刺激偏见,这是集成在整个集合时间。此外,不太严重,误差来源也发挥作用,如振动改正错误,g ^ 2的效果。这些小,零错误时也有一个合理的影响在长期内集成。gydF4y2Ba
测试3 -实际GQ7数据相比,使用GX5 IMU数据进行后期处理模拟在诱导GNSS停机gydF4y2Ba
大多数GNSS / INS系统不习惯在办公室桌面或实验室花岗岩块;因此,实际的测试数据是有价值的。用于测试的数据聚集在一个仪器的悍马(图5),配备多个GNSS / INS系统以及射频衰减器诱导GNSS中断。其中一个GNSS / INS系统是一个高精度单元用作参考系统。gydF4y2Ba
开车在当地进行参考单元的数据,GX5, GQ7同时记录。参考单元和GQ7 RTK修正和处理RF-attenuator用于人工诱导同时GX5和GQ7 GNSS中断。为了显示真正的影响战术级诗句工业品位IMU,主要负责模拟,取代GQ7与GX5 IMU数据。这是有效的方法,两个系统准确GPS-timestamped IMU数据和仿真进行验证之前对无数的实时数据集。图6显示了卡尔曼滤波估计的差异在30秒的GNSS停机位置跟踪。图7显示了水平位置错误的战术,工业级IMU的参考单元在30秒的中断。比较这两个数据,你也许会问为什么工业级IMU的水平位置错误似乎高于两个轨道之间的距离在地图上。重要的是要注意,有一个沿径(旅行)的方向错误,很难分辨二维图。过滤器修正这个错误是很明显的“GNSS信号恢复启动”事件后的滤波器试图追踪再获得的GNSS的位置测量。gydF4y2Ba
图5 -测试车辆与GQ7 GX5,高精度参考单元安装。gydF4y2Ba


图6 -在GNSS停机位置追踪报道战术与工业级艾莫斯(航拍图像视图显示清晰的停车场是无名在地图视图)gydF4y2Ba

图7 - 30秒的GNSS停机期间水平位置错误gydF4y2Ba
测试4 -实际,详细比较GX5和GQ7在诱导GNSS停机gydF4y2Ba
后处理和模拟数据可能显示一些棘手的业务可能发生(没有),那么让我们看一个直接的比较。对于这些数据,相同的悍马测试系统,收集数据在当地RF-attenuator-induced GNSS中断。困难的事情从一个直接比较的测试分析数据并不是所有性能的两个设备之间的差异可以归因于独自IMU性能的差异。被测试的设备有不同的GNSS子模块,不同的GNSS加工路径(松耦合和紧密耦合),和不同的卡尔曼滤波器架构。那就是说,这个测试是包括出于完整性的考虑,但它应该说测试3是真正的黄金标准比较乌兹别克斯坦伊斯兰运动的影响。gydF4y2Ba
由图8可以看出,GQ7优于GX5在30秒中断。注意算法帮助很重要的特性,如轮式车辆约束和零速更新,关闭了这个测试让卡尔曼滤波器估计尽可能相似的两个单位和减少任何algorithm-induced有益的影响。图9显示的水平位置误差GQ7 GX5对参考单元。很明显,GQ7执行远优于GX5在这特定的操作。gydF4y2Ba

图8 -在GNSS停机位置追踪报道GQ7与GX5gydF4y2Ba
图9 - 30秒的GNSS停机期间水平位置错误gydF4y2Ba

总结gydF4y2Ba
很明显,有一个战术级IMU改善航行性能和投资于更高的执行IMU确实有好处。最近MEMS传感器技术的进步使得tactical-grade艾莫斯进入领域的低成本GNSS / INS系统,这些系统正在不断发展与他们的前辈们更加昂贵。此外,我们展示了标准化测试的进展一直到现实世界的汽车测试和一个如何普遍预计IMU数据表性能指标影响他们的系统在现实世界中。gydF4y2Ba
内容与本文作者的意见,不一定代表RoboticsTomorrow的观点半岛app官网gydF4y2Ba

帕克的主——微应变传感产品gydF4y2Ba
帕克主-微应变的惯性传感产品生产工业级最小和最轻的惯性传感器可以用于先进制造、非公路用车辆、商用和军用载人和无人驾驶车辆,和土木结构。产品温度补偿采用了专有的校准过程,包括倾斜垂直参考单元,艾莫斯,明显和INS / GPS导航,稳定,移动地图,地形补偿等等。联系主额外定制设计的解决方案。gydF4y2Ba
其他文章gydF4y2Ba
方法来改善你的IMU性能gydF4y2Ba
与改进的移动映射系统驱动无人驾驶飞机gydF4y2Ba
高性能惯性传感器的机器人系统gydF4y2Ba
更多关于帕克主——微应变传感产品gydF4y2Ba
评论(0)gydF4y2Ba
这篇文章没有任何评论。成为第一个在下面留下你的评论。gydF4y2Ba
特色产品gydF4y2Ba

