当我们发布的数字E4T微型光学装备编码器需要更新工艺来更好地处理小型编码器磁盘。公司决定使用自动化和上面的δ机器人系统。gydF4y2Ba
 美国数字自动化生产过程使用机器人和内部工程人才gydF4y2Ba
美国数字自动化生产过程使用机器人和内部工程人才gydF4y2Ba

案例研究从|gydF4y2Ba我们的数字gydF4y2Ba
当我们数字引入了E4T,一个新的、小型光学编码器,那些处理组件在生产系统operators-faced困难。先前的方法,完美地工作了大编码器过于繁琐,使用新的,较小的编码器磁盘。gydF4y2Ba
提高运营商的工作条件和自由时间更高级的任务,公司决定自动化这个过程一直是手工完成的。因为美国的数字是一个垂直整合的公司与广泛的工程专业知识和资源,它开始在内部解决这个问题。gydF4y2Ba
开发一个新的自动化系统从来都不是件容易的事。一路上偶尔有障碍,但毅力我们数字设计一个全新的系统,基于一个三角洲机器人,并取得一个成功的结果。gydF4y2Ba
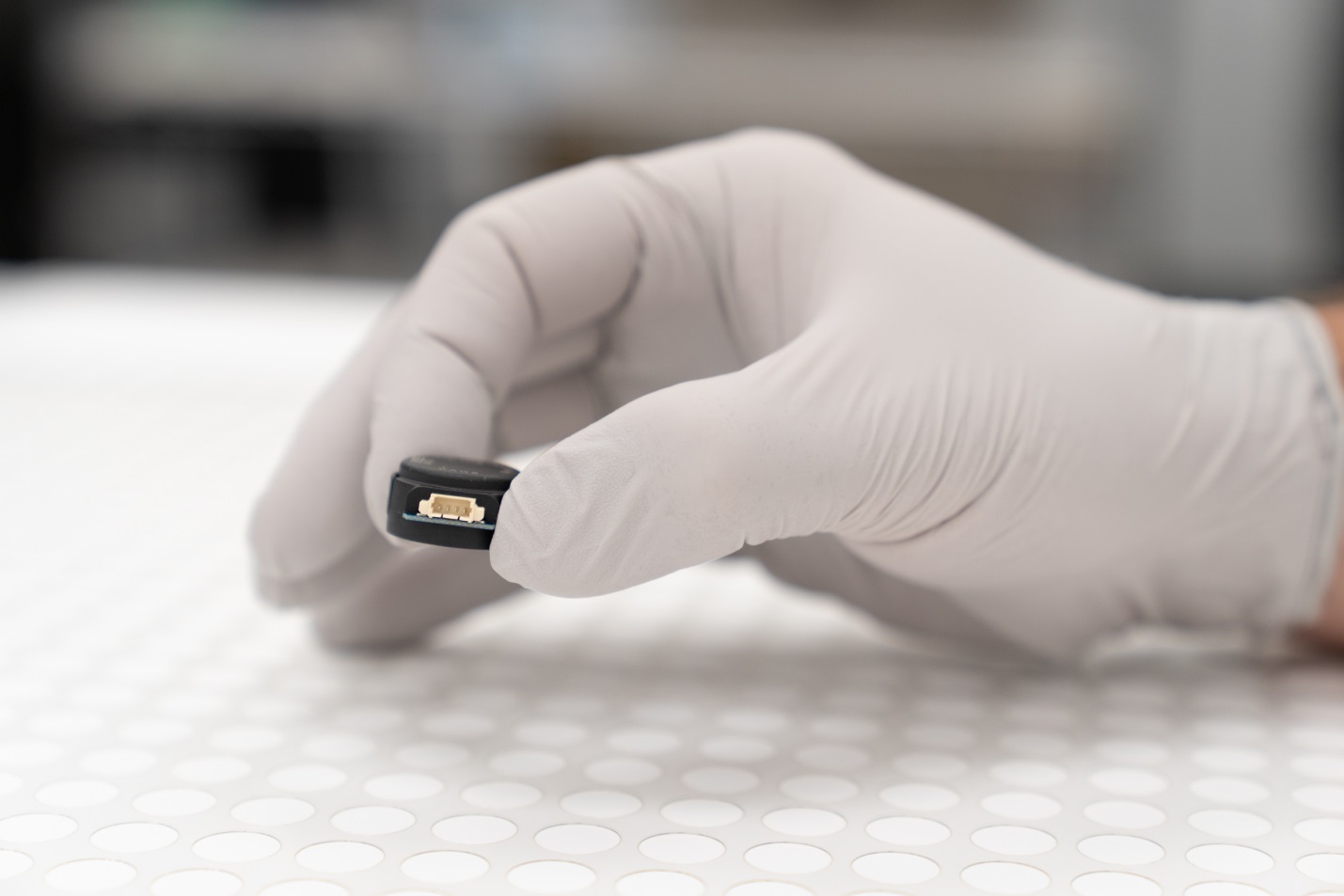
在E4T微型光学编码器,如上所示,是一个很小的磁盘。在生产过程中,运营商很难将磁盘。gydF4y2Ba
前面的方法——在小型化gydF4y2Ba
美国数字光学编码器的核心是一个透明的聚酯薄膜磁盘模式的黑色线条。运营商在美国生产磁盘使用高精度数字暗房的照片照片策划者在50000 dpi分辨率。聚酯薄膜是发达在暗房里,然后通过输送机系统转移到激光切割在隔壁房间。gydF4y2Ba
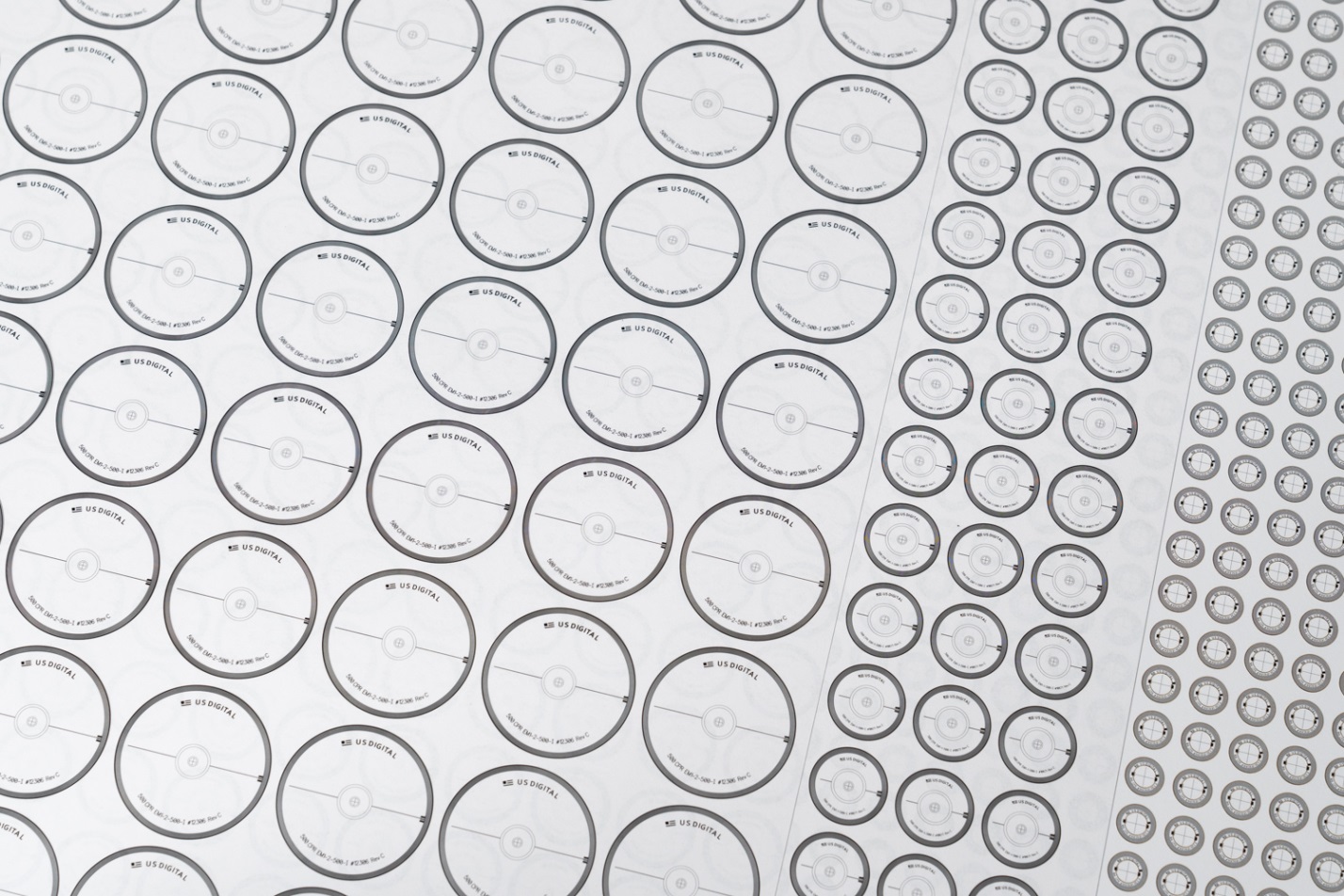
磁盘上成像的聚酯薄膜,然后由激光切割机彼此分离。上面显示是2英寸,1英寸,切成1/2英寸编码器磁盘(50.8毫米、25.4毫米、12.7毫米)。gydF4y2Ba
在激光切割表,运营商支持的纸上的电影。他们建立了激光切割机运行,启动自动化过程,然后可以自由做其他任务而聚酯薄膜的激光削减了个人磁盘表。gydF4y2Ba
自动激光首先利用其视觉系统来定位框标,小十字准线或独特的标志印在电影和用于对齐。一旦知道磁盘位于,激光削减每个磁盘的外径,周围一圈,小圈内径,以及独特的磁盘所需的特定的功能设计。激光的热量稍微融化盘的边缘,他们坚持支持下面的纸。gydF4y2Ba
运营商和移动一张磁盘回到工作台。在一个手动的过程被称为“磁盘选择”,他们选择坚持磁盘表和堆栈在杆的存储在库存。gydF4y2Ba
一种新方法——在小型化gydF4y2Ba
多年来,磁盘选择运营商一直偶尔的小任务。这是他们很容易适应在繁忙的工作日,这并没有花费太多置于一个新产品破坏现状。gydF4y2Ba

由于减少E4T编码器磁盘的大小,用手捡是一个非常耗时的过程对我们Digital-especially以来有1000多个磁盘上一张。gydF4y2Ba
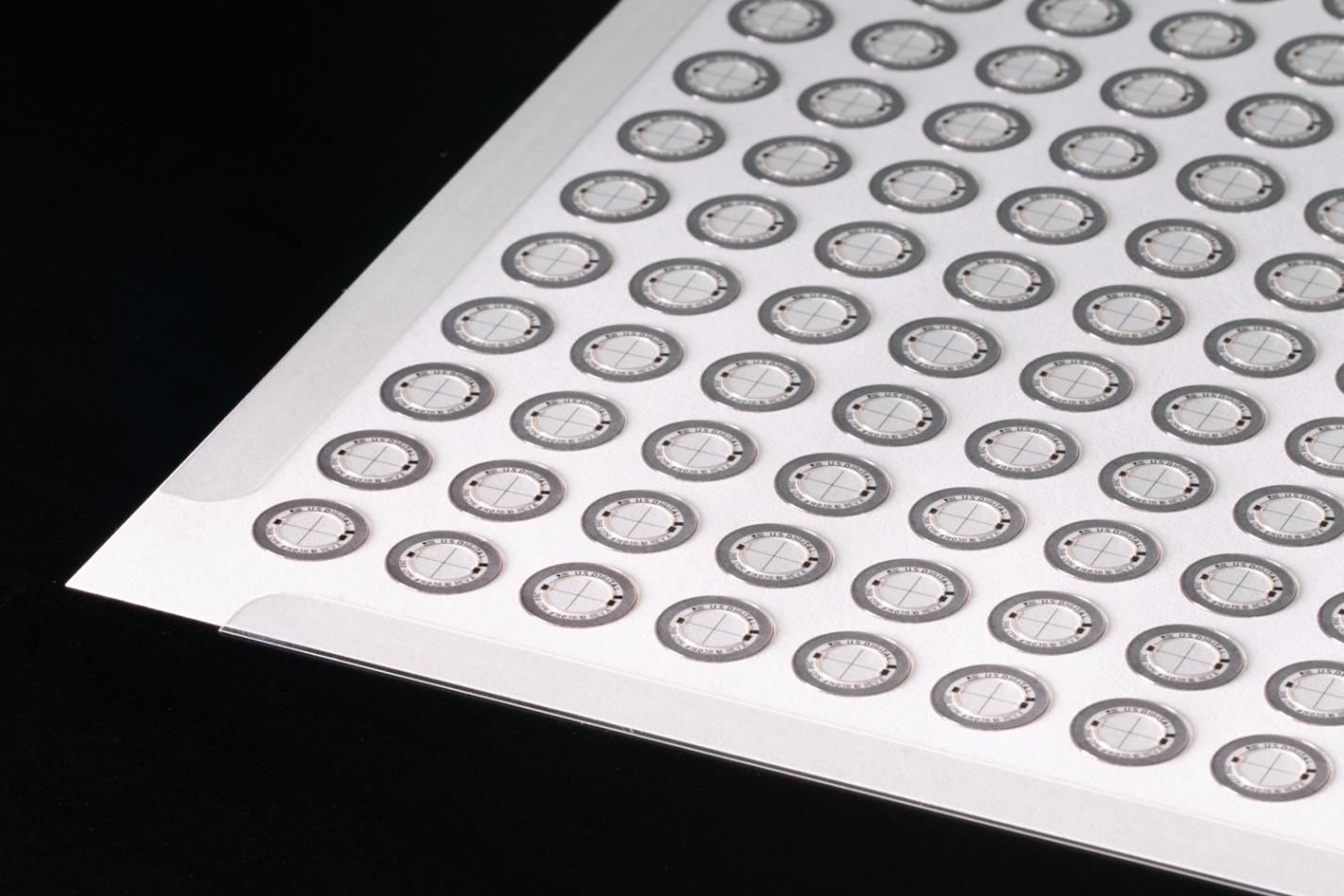
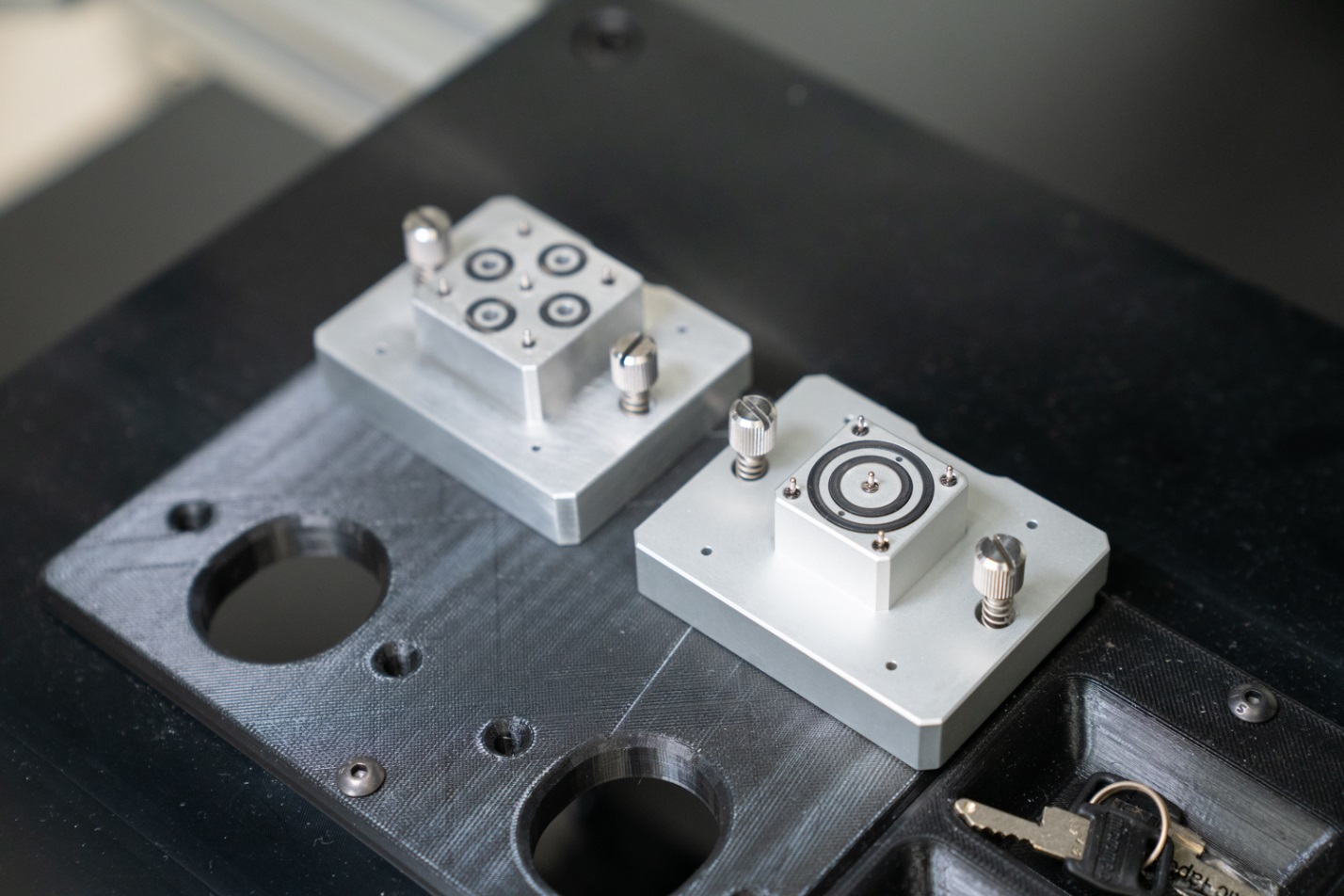
美国数字E4T光学编码器设计满足小型运动控制产品的需求,利用,空间是有限的。的聚酯薄膜磁盘E4T只有半英寸直径大小的衬衫按钮,虽然薄在7/1000英寸。gydF4y2Ba
E4T磁盘中产生大量的每单一千多个磁盘。gydF4y2Ba
小尺寸和大量的新磁盘运营商选择更加困难,但有一个额外的问题。每个磁盘上,两个标签伸出的空间核心圈子;这些选项卡槽的中心对齐磁盘挂载后的装配过程。gydF4y2Ba

两种标签伸出到内圈。标签适合凹槽的中心,确保小磁盘安全地举行的中心,一个专利未决的过程。gydF4y2Ba
运营商必须精确对齐选项卡上新的,较小的磁盘与凹槽的堆积rod-something他们从来没有与其他编码器磁盘。凹槽帮助防止损坏标签时存储在资源,调整槽的标签使它更难运营商堆栈的磁盘。gydF4y2Ba
“E4T确实是一个问题,只要挑选他们,叠加。这是一个痛苦的过程,”Neal Donowitz说,首席运营官我们数字。gydF4y2Ba

为我们调整光盘数字的运营商E4T编码器被证明是具有挑战性的,不仅因为体积小,但因为磁盘功能两个选项卡,需要与存储的杆。gydF4y2Ba
后E4T引入市场变得很受欢迎。销售快速增长,运营商发现他们花越来越多的时间在极其艰苦的工作的磁盘选择。他们有更少的时间为他们的其他任务在暗室和激光切割的房间。gydF4y2Ba
“我们寻找方法,机器可以帮助我们的人,而不是让我们的人民帮助机器,“Donowitz说。gydF4y2Ba
他认为磁盘选择过程可以被更新,由一个自动机器人的机器。但是而不是发送工作由承包商完成,他跟着我们数字垂直整合的核心价值,并选择了内部发展。机器人将会是一个购买的部分,但Donowitz知道我们电子工程师,机械师和运营商有高级技能构建所需的一切工作。gydF4y2Ba
凯尔Viestenz,我们数字一个机械工程师,负责自动化项目。Viestenz看到有另一个好处为磁盘选择使用一个机器人。gydF4y2Ba
“我们不会处理磁盘一样,”他说。“运营商使用手套,他们非常灵活和快速,但半英寸外径,7/1000英寸thin-these小事情很容易弯曲。构建一个机器可以帮助照顾这些类型的问题。”gydF4y2Ba
但首先,他必须找到最好的类型的机器人的工作。gydF4y2Ba
选择一个机器人gydF4y2Ba
当Viestenz开始考虑选择一个机器人,这个机器人可以执行磁盘挑选工作,他听说三角洲从公司创始人兼首席执行官大卫Madore机器人。gydF4y2Ba
“三角洲机器人是伟大的,因为所有的沉重的部分,像汽车一样,不必穿过空间,“Madore说。“他们严格安装在一个框架,只有轻型武器垂。”gydF4y2Ba
他们的另一个优点,根据Madore ?与传统的装配机器人,必须加强移动巨大的手臂,汽车和触手,δ机器人手臂几乎没有移动质量。gydF4y2Ba
“他们能迅速加速,在高速移动。他们的理想传输轻量级加载很快,”他说。gydF4y2Ba
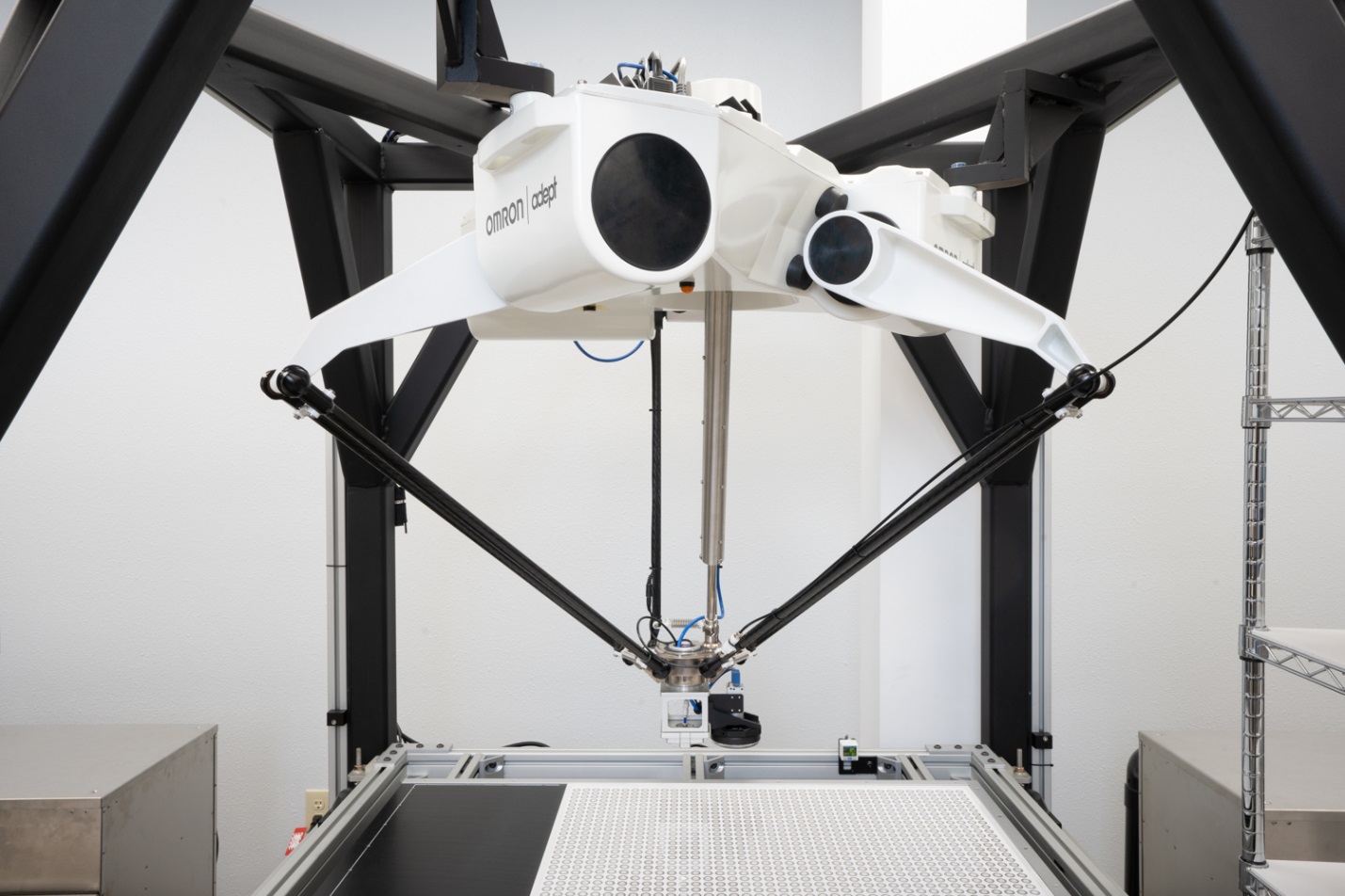
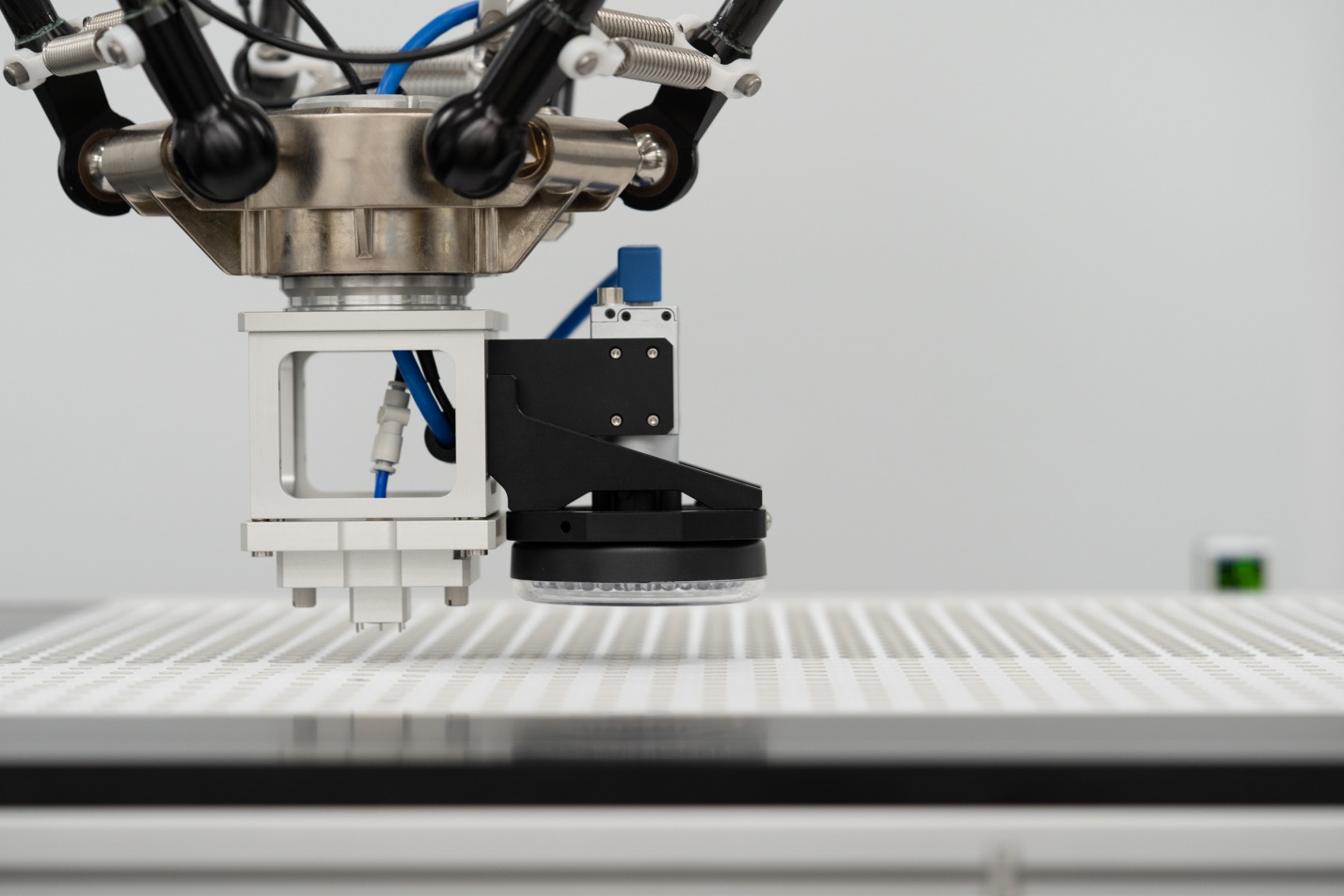
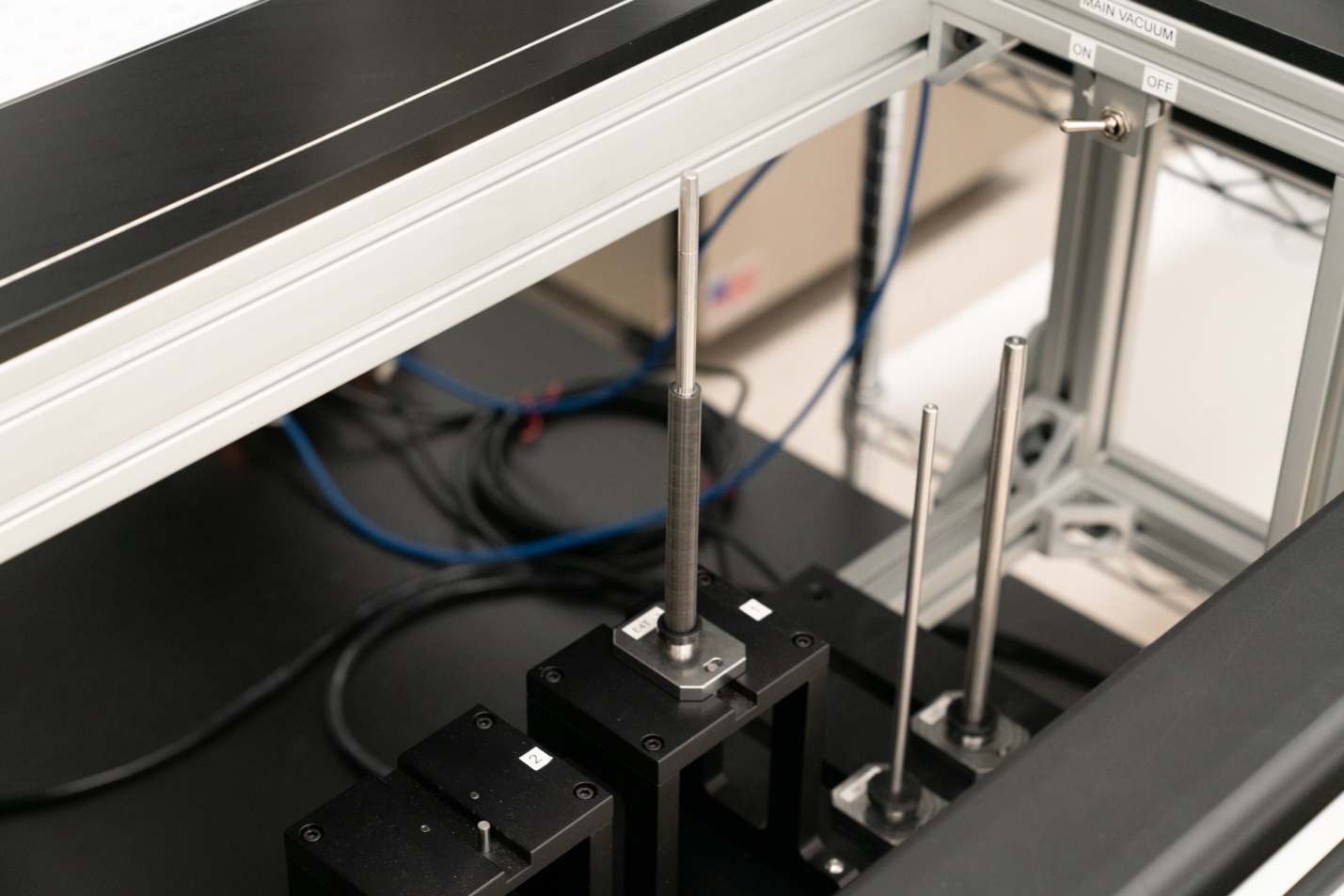
大多数的质量δ机器人(漆成白色,上图)是严格安装在顶部的框架。gydF4y2Ba
因为手臂垂很少质量(黑色,上图),他们可以移动非常迅速。三角洲机器人非常适合移动光加载速度快。gydF4y2Ba
Viestenz决定三角洲机器人。gydF4y2Ba
“它的速度是关键,”他说。”也是在所需的精度,工作区中我们想要的。δ机器人看起来像一个适合这个项目。”gydF4y2Ba
构建一个系统在机器人gydF4y2Ba
选择和购买一个机器人仅仅是个开始。机器人作为一个单元,但是它需要一个系统建立在它。Viestenz需要一个框架支持机器人,一个表来支持磁盘作为机器人工作,工具来处理磁盘、真空和强制空气系统、视觉系统和其他许多物品。一切在未来picture-except robot-had设计和建造。gydF4y2Ba
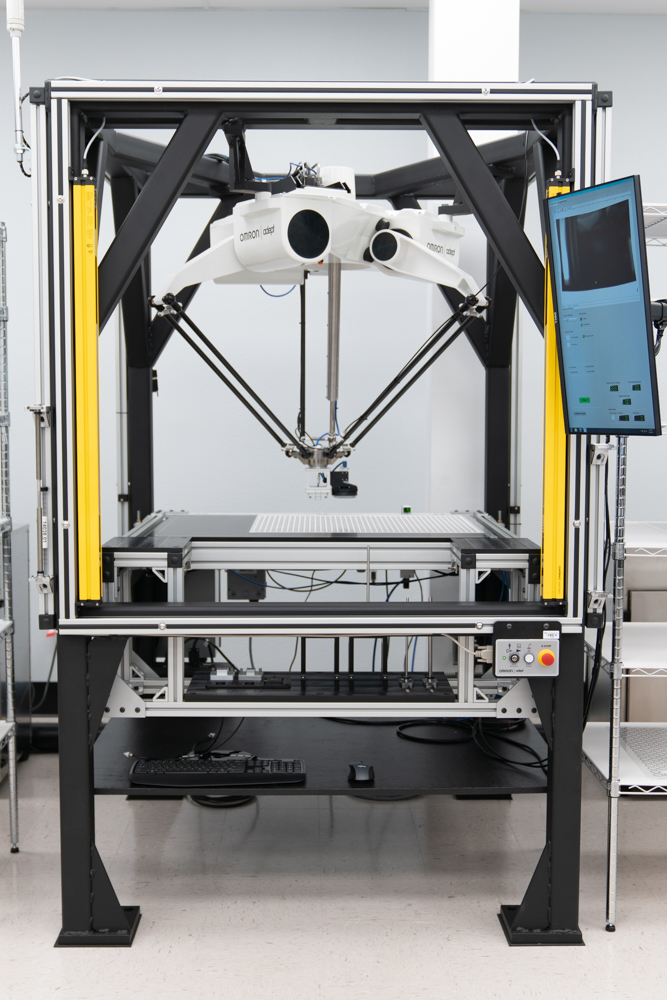
白色的三角洲机器人(下面黑色的手臂暂停)是一个购买项目。其他的设计和建造内部工作人员在我们数字。gydF4y2Ba
结果Viestenz需要解决许多问题,他建立了一个机器周围的机器人。gydF4y2Ba
框架gydF4y2Ba
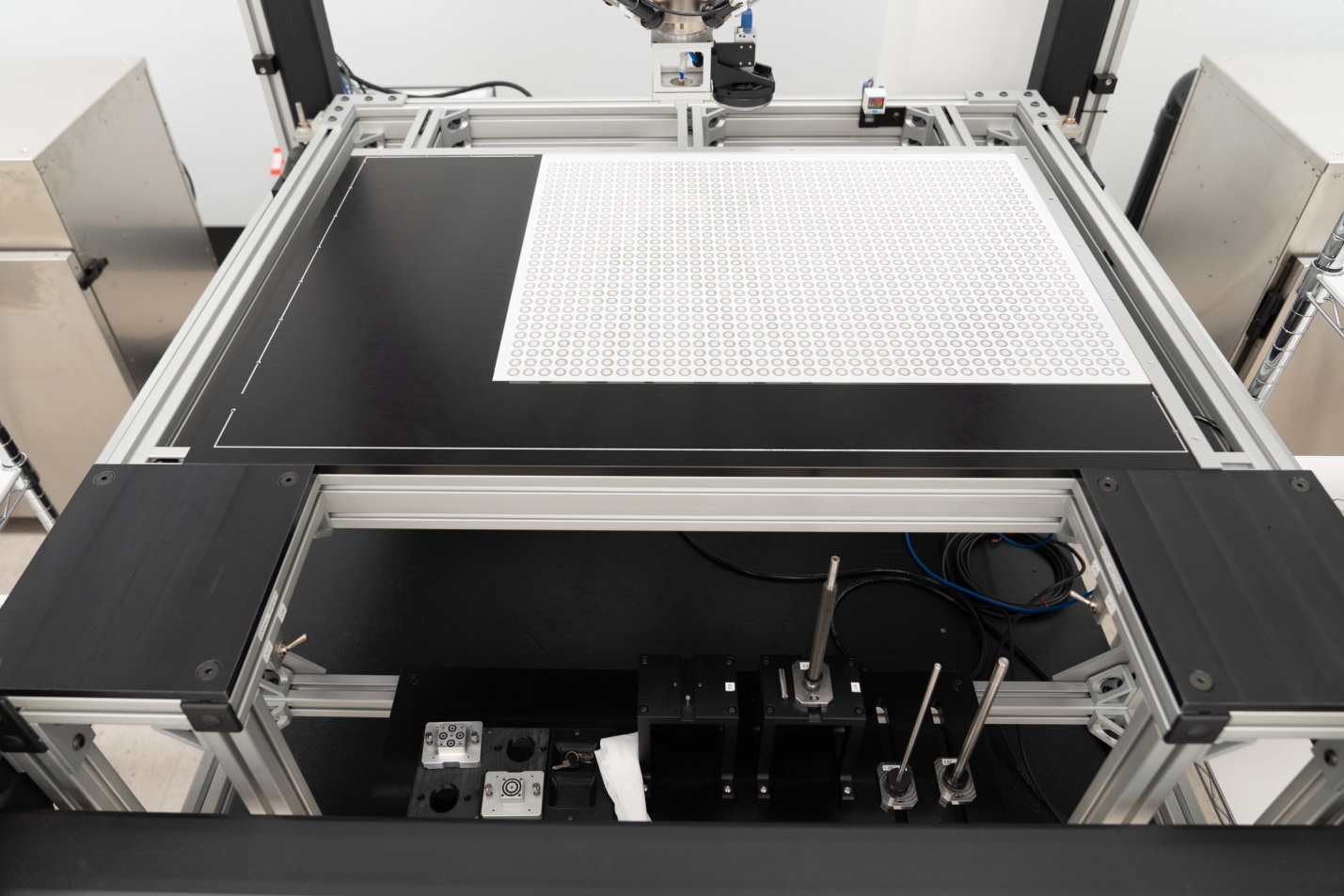
周围的整个系统是一个外框,4.5,4.5和7英尺高。主框架成员由3英寸由切成1/4英寸3英寸墙钢方管,和支架是由1英寸厚的钢板。gydF4y2Ba
机器人安装在顶部的框架,和一个工作表面安装一半下来,在机器人的手臂。Viestenz量身定制的设计框架,以适应所需的磁盘选择工作区。gydF4y2Ba
框架必须非常严格。“你可以失去定位精度如果有框架的移动机器人运动期间,“Viestenz说。“这就是为什么框架是如此巨大;它的重量超过800磅的框架,没有别的。”gydF4y2Ba
框架也有适合的房间将被使用。Viestenz设计用1/4英寸的顶部框架之间的间隙和门口的房间。gydF4y2Ba

框架、焊后和粉末涂料但在组件被安装。超过800磅,它的质量稳定系统在机器人调动了定位精度的关键要求。gydF4y2Ba
一度Viestenz考虑帧由外部供应商,但是遇到了一些问题。供应商的交货期还是相当大的。和帧必须广场紧密公差;否则,机器人将失去准确性。当杰夫康纳,我们中的一个数字与出色的焊接技能熟练的机械师看了计划,他说,“我可以。”He got the opportunity, and the frame he made turned out to be sturdy, rigid, square and delivered on time.
消除振动gydF4y2Ba
当Viestenz开发美国数码工程机测试区域,帧站在水泥地上。他说,即使有大量的帧,“当我把机器放在一起,跑了很多;你可以感觉到震动。”He knew he'd have to find a way to damp the vibrations. Whenever the machine made a fast move and then stopped, its final position needed to be accurate; any lingering vibrations could cause errors.

下一层很薄的防震填充物是可见的钢框架的脚。消除振动对确保定位精度至关重要。gydF4y2Ba
Viestenz发现一个简单的解决方案。而不是螺栓混凝土楼板的框架,通常做的,他使用防振橡胶垫在每个脚。填充干得不错的阻尼结构框架的振动。另一个好处是,Viestenz发现填充压缩帧的重压下,这有助于消除不均匀在地板上。gydF4y2Ba
工作表gydF4y2Ba
工作表安装在框架内,38英寸地板,与磁盘放置一张纸。gydF4y2Ba
Viestenz设计表调整螺栓的四个角落。他可以根据需要移动上下每一个角落,调整高度,俯仰和滚独立的框架。“我可以有效地使表机器人的水平面平行的旅行,”Viestenz指出。gydF4y2Ba
真空通道和“相框”压紧系统gydF4y2Ba
Viestenz面临的一个挑战是如何按住支持纸大,同时机器人选择磁盘。他第一次尝试将真空通道在工作表面,在纸的周长;它是一个加工槽中间有孔的连接到一个真空源。然而,他发现,“纸是多孔的。当我们试图把真空在纸上,它不会做正确anything-air会通过纸。”gydF4y2Ba
他想出了一个巧妙的解决方案。他做了一个“相框”的聚酯薄膜,符合论文的边缘,和休息的真空孔通道。创建的聚酯薄膜在真空密封通道,成功举办了纸。gydF4y2Ba
工作表中的真空通道躺在一张磁盘的边缘。聚酯薄膜“相框”定位高于真空通道创建一个密封保存表。gydF4y2Ba
的视觉系统gydF4y2Ba
在每次运行的开始,结束的一个摄像头安装在机器人的手臂需要一个图像的基准(位置十字)在每个角落的表。“原来我有摄像机安装在框架上高。相机是俯视的一小部分,把面向表的机器人的坐标系内,”Viestenz说。但他发现,只看一个小面积和位置推断的不够好。他必须知道的斜板。“我发现我不得不移动摄像机到机器人的手臂,和得到很多接近表。然后我可以移动,抓住基准点的位置表上的任何地方。”gydF4y2Ba
在黑色框架内举行的视觉系统,安装的工具。相机拍出来的图像,系统使用东方表在机器人的坐标系统。gydF4y2Ba
一旦四角的相机拍出来的图片在启动时,系统计算的斜板,并在机器人的定位坐标系统就完成了。gydF4y2Ba
这个工具gydF4y2Ba
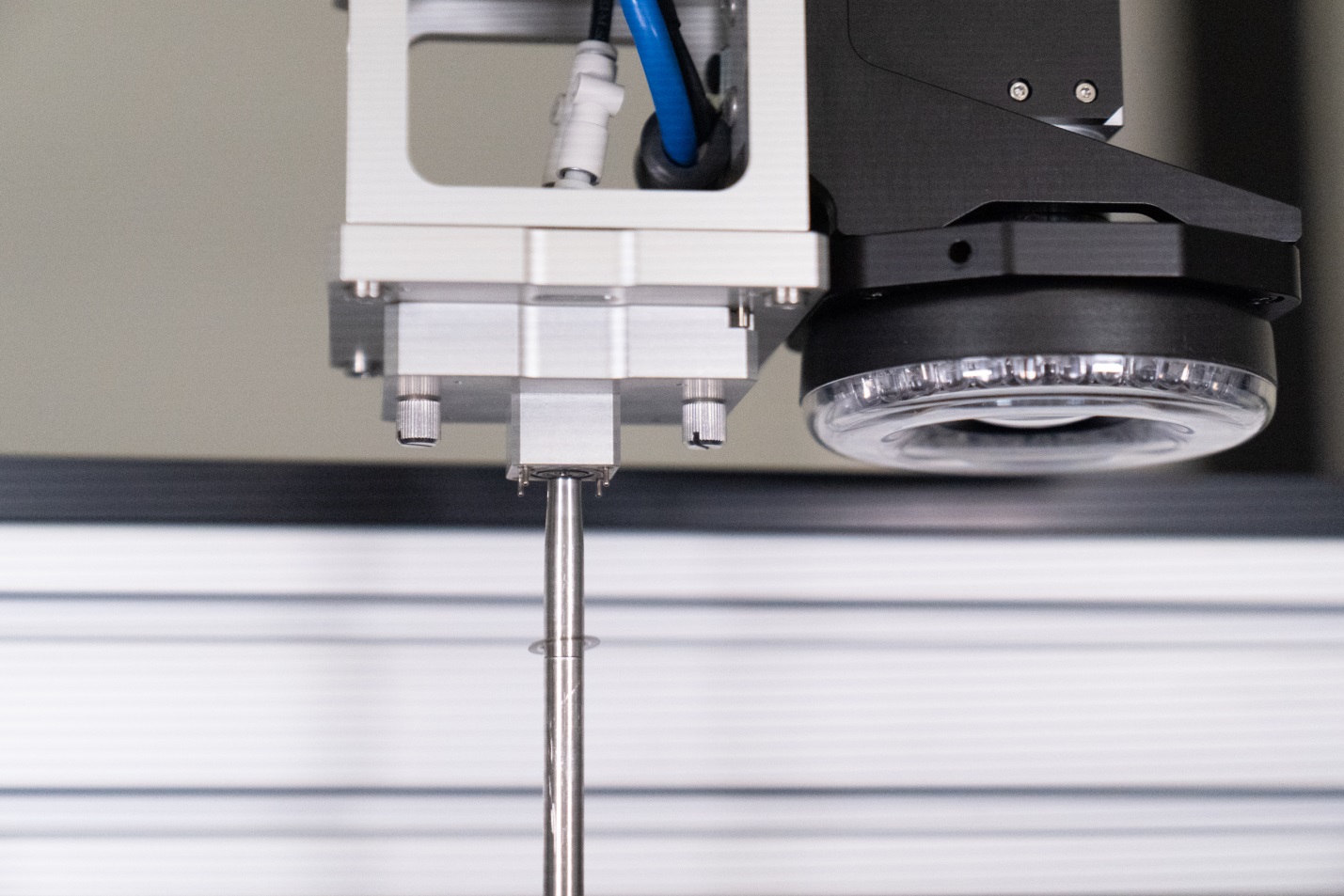
机器人不使用手指或夹子捡磁盘。相反,Viestenz设计一个工具,高度的机器人的手臂,使用真空通道和弹簧压紧销接磁盘;它使用压缩空气来释放磁盘。gydF4y2Ba
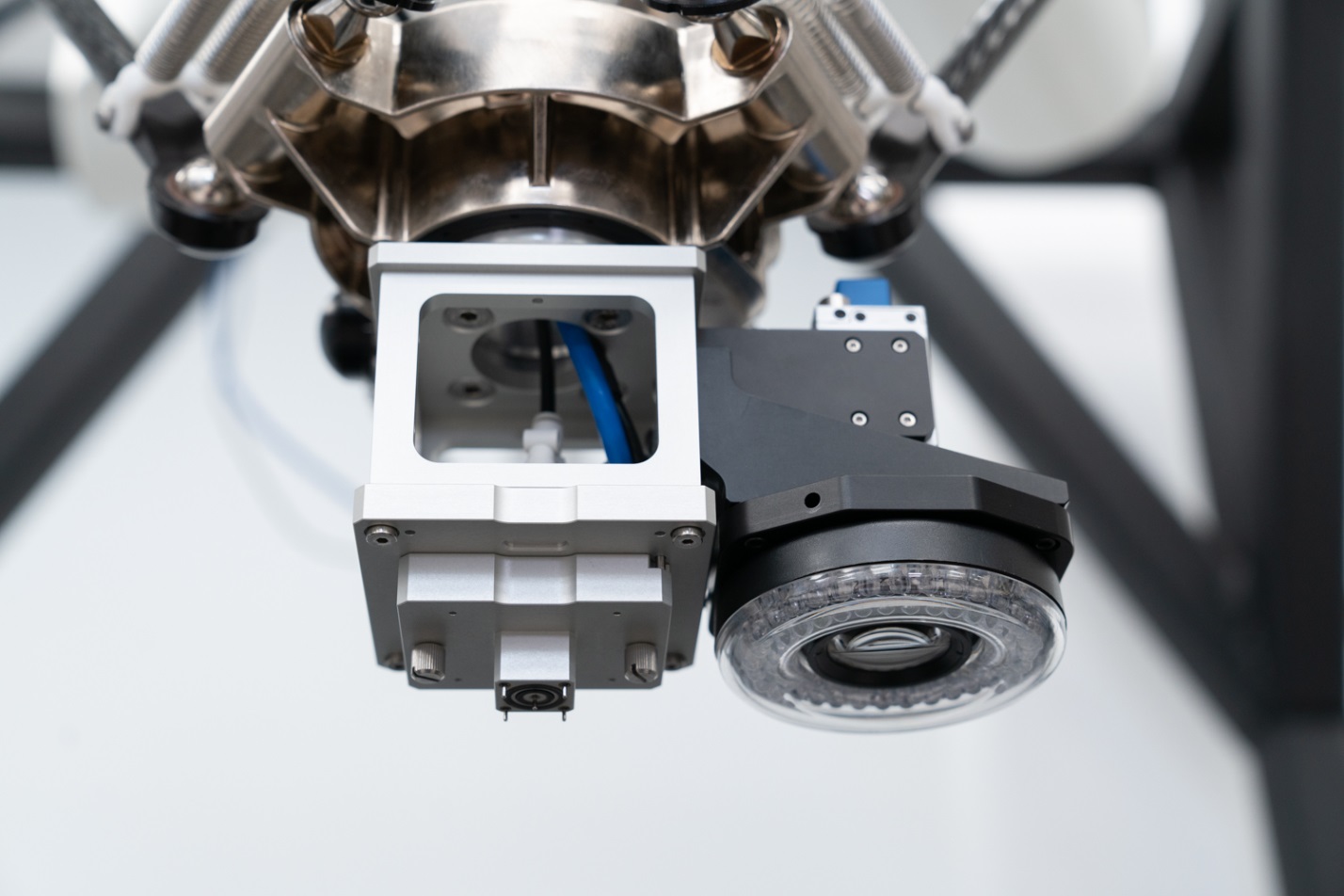
的工具,从下面。黑色2 o型环真空系统随处可见,压紧销中心和工具的每一个角落。视觉系统的摄像机在右边。gydF4y2Ba
该工具的形状像一个细长的立方体。o型环嵌在它的底部表面,相邻小真空通道。下来的工具,磁盘上的o形环创造良好的密封,和真空通道提供吸。弹簧针周围的外围工具推纸保存下来作为工具按压磁盘,并开始离开。针脚释放后的纸工具已经从表一英寸的一小部分。gydF4y2Ba
”有一个弹簧销在中间,也“Viestenz说:“这有助于我们按住ID十字丝。”It's helpful to leave the fiducial in place; that way, if the operators do part of a sheet and then stop, they can still locate the fiducial and re-orient the machine at a later time.
在开发期间,Viestenz发现他必须占小桌子的平面度的变化,得到良好的对齐工具和表之间的最佳吸。当机器人降低了工具,它只能上下移动,在x - y方向。Viestenz设计了弹簧板解决这个问题;的板块调整音高和滚动的方向,通过弹簧。前面提到的工具安装弹簧板。gydF4y2Ba
Viestenz不仅仅是一个设计,但是一系列的工具,以适应不同的磁盘大小,美国数字。工具被我们精密加工的内部数字机械师。Viestenz也设计了一架不在时使用的工具;它适合框架和工作台之间的方便。gydF4y2Ba
1英寸/ 25.4毫米磁盘工具(左)和0.735英寸/ 18.7毫米磁盘,存储机架。o型环真空系统和压紧销也是可见的。gydF4y2Ba
“系统足够灵活的新工具和新程序编写可容纳未来的产品,“Viestenz指出。gydF4y2Ba
叠加棒gydF4y2Ba
捡一个磁盘后,机器人全速移动桌子的边缘,在那里停止,会在垂直叠加杆盘旋。gydF4y2Ba
垂直叠加杆,中心,在工作台的边缘,被部分装载磁盘。另外两个叠加棒存储向右;与其他大小的磁盘使用它们。gydF4y2Ba
真空关闭,并帮助磁盘途中,飞机的压缩空气爆炸的磁盘工具和下杆。gydF4y2Ba
机器人排放磁盘工具和叠加上杆。标签在磁盘上适合凹槽在杆上。的压缩空气将磁盘下杆。gydF4y2Ba
Viestenz设计了一系列叠加棒加工的各种大小的磁盘机。棒的使用E4T disks-the的两个选项卡凸到他们内部diameter-he创建匹配的凹槽棒接受选项卡。机器人精确对齐磁盘杆上面,所以标签排队与凹槽完全当磁盘退出工具。gydF4y2Ba

机器人对齐选项卡上的磁盘叠加杆的凹槽。gydF4y2Ba
允许公差在卸货磁盘,Viestenz设计了一个可移动的,锥形的尖端适合棒的结束。这将创建救援占位置错误的20/.1万分之一英寸的机器人移动到的位置。gydF4y2Ba
以合理的长度,保持棒Viestenz创建了两个stations-two棒站在一起。机器人过程E4T磁盘时,栈600个磁盘有一杆,和600杆。gydF4y2Ba
转运站gydF4y2Ba
一杆已满,磁盘转移到另一个杆的运输和存储库存区。Viestenz设计了一个转运站,运营商可以执行这种微妙的任务。他们把锥形接头从叠加杆,并插入到结束的存储棒。然后一个简单的任务操作员磁盘从一个杆滑动到另一个。gydF4y2Ba

叠加杆上的磁盘可以被转移到一个存储棒,将磁盘时在库存。gydF4y2Ba
人机界面(HMI)gydF4y2Ba
Viestenz设计人机界面直观、可靠。接口是一个大型,触摸屏平板显示器,安装在框架在一个方便的高度。运营商可以通过选择菜单和触摸控制机的功能按钮在屏幕上。Viestenz说,“我们试图保持它的简单性,以及可用。它跟踪运行时间,有多少磁盘堆叠起来。它使一个粗略的预测需要多长时间,为每个磁盘和多长时间。”gydF4y2Ba

人机界面(HMI)操作面板。触摸屏显示运营商选择菜单和按钮来控制机器的功能。gydF4y2Ba
在开发期间,运营商Igor Korotin和保罗Fedorenko了人机界面的设计,和Viestenz包括许多特殊功能需要他们知道。因为机器人手臂,上方,配有绝对编码器,位置信息被保留,如果运营商需要停止中途处理一张磁盘。恢复时,运营商可以选择在不同的位置开始,由行和列确定。他们也可以选择他们想要接多少磁盘。“大多数时候,你会选择一个表,“Viestenz解释说,“但伊戈尔和保罗知道这些其他选项就好了。我把它们放在接口,给他们的灵活性。”gydF4y2Ba
安全光幕gydF4y2Ba
当机器人处于高功率模式,它移动得很快。对于运营商的安全,Viestenz一道光幕安装在机器的前面。多个红外光束创建一个无形的屏障;如果有人太近和中断的横梁、紧急停止触发,机器人立即停止。准备好后,操作员可以从上次重新启动机器人。没有归航行动是必要的,由于机器人的绝对编码器报告工具的位置。gydF4y2Ba
在开发过程中发现gydF4y2Ba
部分一起,机器开始成型,Viestenz可能开始慢慢操作,运动局限于短期举措,然后最终全速而选择磁盘从整个表。大部分的开发进展顺利,但是他必须解决许多意想不到的问题。gydF4y2Ba
运动编程gydF4y2Ba
当他编程机运动,Viestenz不得不调整速度和加速度。花了时间一切都刚刚好。工具开始提高磁盘的表,他尝试用工具的速度,寻找正确的时间来得到一个好的真空密封,而不是留下的磁盘。在另一端的旅行,当工具排放磁盘上杆,他调整速度精度。他还把机器人通过高速运动,寻找最快的速度一旦磁盘选择表。他的目标是减少总周期时间。gydF4y2Ba
旋转的垂直轴定位gydF4y2Ba
δZ方向上下移动,机器人和维护工具的定位在x - y平面工具通常不绕垂直轴旋转。在项目的开始,Viestenz意识到这三个轴的运动是不够的。gydF4y2Ba
对于这个系统,工具必须删除磁盘上叠加杆与标签精确与匹配的杆的凹槽。如果磁盘的表是完全一致的,广场在关系表中,对各种东西的工作原理。但Viestenz需要一种方法来允许一些斜板。gydF4y2Ba
看这个视频学习第四轴补偿板的倾斜。gydF4y2Ba
为了弥补倾斜,他命令一个可选的4轴当他购买了机器人。花键棒可以扩展,和旋转的法兰连接的工具。这种额外的绕纵轴旋转解决潜在的对齐问题通过允许倾斜角被纳入机器人的坐标系统。每个磁盘的标签现在可以正确定位高于叠加杆的凹槽。gydF4y2Ba
不会释放一些磁盘表支持gydF4y2Ba
偶尔一个磁盘坚持支持表如此之紧密,机器人不能捡起来。Viestenz必须找到一种方法来确定,当这发生,并指导机器人做什么事件。gydF4y2Ba
他安装了一个传感器和程序来检查每个磁盘都捡起后真空压力。如果读不超过一定水平,它表明,磁盘被留下。在这种情况下,“再试一次,”Viestenz说,“如果第二次尝试失败,机器人移动到另一个磁盘上。”The stuck disk remains behind on the paper.
空气动力学直径和磁盘gydF4y2Ba
磁盘堆栈的最有效的方法是让他们迅速离开工具面,并迅速击落叠加杆的底端。如果他们慢慢漂浮下来,有机会可以挂杆到达底部,并有可能引起更多的磁盘到果酱。这台机器是用来运行无人值守,所以堵塞和满溢的磁盘是不可接受的。gydF4y2Ba
Viestenz迅速补充压缩空气推动使用磁盘工具和叠加杆,在所谓的“排污”的过程。“我认为最小的磁盘像E4T是强硬的,“Viestenz回忆道。吹掉”,但对他们来说,工作真的它只是拍摄下来,你甚至不能看到磁盘,它移动得太快。”gydF4y2Ba
大1英寸磁盘问题引起的。他们下降较慢,也许是因为他们更大直径的增加导致了空气阻力。当Viestenz增加空气压力盘向下移动得更快,他惊讶地发现额外的空气导致磁盘坚持的工具,而不是释放足够快。似乎快速的空气和更大的磁盘直径组合来创建一个轻微的真空吸力和磁盘之间的工具。让它变成了一个微妙的平衡。gydF4y2Ba
成功!gydF4y2Ba
一个接一个地出现Viestenz解决每一个问题。开发完成,集成所有的部分完成,和磁盘机在生产区域工作。完成所有目标,Viestenz Donowitz概述了在项目的开始。gydF4y2Ba
Donowitz总结道,“我们使用机器人来帮助人们,让人们去做更高层次的工作。他们可以做各种各样的其他任务,同时机器正在运行。它是有效的。”gydF4y2Ba
辛苦地挑选和叠加磁盘本身,而是运营商现在可以设置机器,按下按钮,让机器人执行的整个过程。gydF4y2Ba
内容与本文作者的意见,不一定代表RoboticsTomorrow的观点半岛app官网gydF4y2Ba
评论(0)gydF4y2Ba
这篇文章没有任何评论。成为第一个在下面留下你的评论。gydF4y2Ba
特色产品gydF4y2Ba

