带有无刷直流、音圈或三相直接驱动驱动器的运动控制系统使用位置伺服控制器,动态改变每个电机相位的电流。gydF4y2Ba
启用峰值伺服性能与热保护gydF4y2Ba
Yegor Rabets,电子团队|gydF4y2BaZabergydF4y2Ba
带有无刷直流、音圈或三相直接驱动驱动器的运动控制系统使用位置伺服控制器,动态改变每个电机相位的电流。这些驱动器几乎总是以维持其轨迹所需的最小电流驱动。我们可以利用这种现象,偶尔要求相对大的电流短暂爆发,这可以提高系统的整体性能——例如,跟上更激进的轨迹或克服更强的干扰。幸运的是,在许多应用程序中,只需要简短的脉冲就可以显著提高性能。作为一个例子,下图显示了典型的电机相电流在Zaber的gydF4y2BaX-LDA阶段gydF4y2Ba在高加速度的运动中。gydF4y2Ba
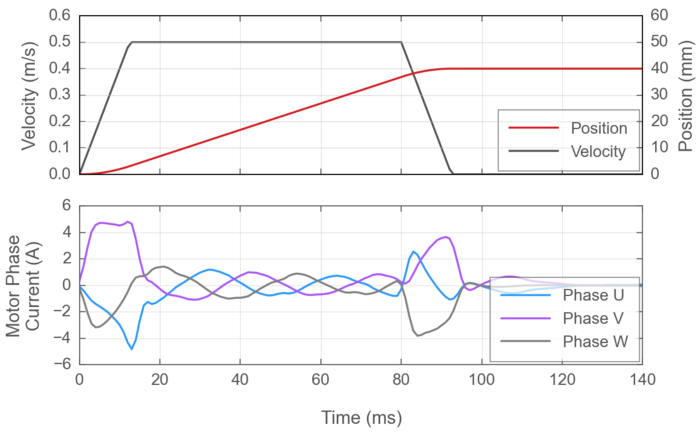
图1:Zaber X-LDA阶段的典型相电流,在一个非常激进的轨迹中,加速度刚刚超过4g (40 m/s²)。请注意,X-LDA在加速和减速时超过了2.5 A的连续电流极限,但在匀速运动时没有。gydF4y2Ba
为了在这些相对大的电流爆发期间保持安全的电机温度,使用伺服控制器的执行器具有特定的连续(RMS)电流限制,可以无限期地持续,而瞬时(“超速”)电流限制只能在短时间内使用。我们如何知道何时使用超过连续极限的超速电流是安全的?简单地说,我们需要有意识地在这些爆发之间平衡足够的冷却时间。最常用的方法是通过直接测量或计算估计来监测电机温度。gydF4y2Ba
常用热防护方法gydF4y2Ba
电机温度传感器gydF4y2Ba
集成到电机绕组中的温度传感器提供了电机温度的直接读数。当热量在电机绕组中缓慢积聚,并且可以假定在电机中均匀分布时,集成传感器可以提供最准确的数据。然而,热传导的时间常数在电机绕组的所有阶段往往比短暂的爆发超速电流。因此,嵌入式温度传感器可能不能足够快地响应,以保护不完全均匀的电机绕组线上的大电流负载所产生的局部热点。gydF4y2Ba
热模型gydF4y2Ba
热模型试图根据可观察到的非温度变量来估计系统的热状态。在大多数执行器中,产生热量的主要来源是电机绕组中的阻性损失和绕组中交流电产生的涡流。这两者都与电机电流有关,因此电机的温度通常是通过输入电机的电流历史和电机的热特性来估计的。需要了解电机热特性的热模型方法非常常见,但其主要缺点是大多数电机的热数据不容易获得。gydF4y2Ba
我²tgydF4y2Ba
工业标准I²t算法是一种特定类型的热模型,它被简化为不需要任何显式的热参数。在其最基本的公式中,I²t简单地定义了除执行器连续电流产生的热能外,执行器允许使用的多余热能池。I²t的名称来源于这样一个事实,即在电机中产生的热量与电流的平方成正比。算法简单地监测电流随时间的平方,并集成瞬时电流和连续限流之间的差值:gydF4y2Ba
 |
(1)gydF4y2Ba |
除了电机电流限制外,I²t算法所需的唯一参数是允许的最大I²t积分,它本质上定义了电机中允许的多余热能的量。当I²t积分超过这个预先定义的阈值时,电机电流通常被节流回连续允许的极限,以防止进一步加热。gydF4y2Ba
Zaber产品的热保护gydF4y2Ba
所有Zaber的直线电机和音圈产品使用I²t算法,以确保超速电流安全使用。作为额外的保护级别,直线电机产品也有一个集成到电机的热开关。集成热传感器有助于防止在次优热下沉或环境温度升高的情况下温度缓慢上升。I²t算法主要有助于防止峰值功率爆发产生的相对快速的热量激增。gydF4y2Ba
Zaber ASCII协议中的超速限制gydF4y2Ba
当为直线电机和音圈定位器供电时,Zaber的电机驱动器为驱动器和电机保持并行和完全独立的I²t模型。轴驱动器和电机具有不同的电流限制和I²t积分(“过剩能量”)阈值。gydF4y2Ba
电机的电流限制由以下三种设置来描述:gydF4y2Ba
- motor.current.continuous.maxgydF4y2Ba:电机的连续限流gydF4y2Ba
- motor.current.overdrive.maxgydF4y2Ba:电机的超速(瞬时峰值)电流极限gydF4y2Ba
- motor.current.overdrive.durationgydF4y2Ba:电机能承受其最大超速电流的持续时间gydF4y2Ba
这些设置也定义了电机的I²t积分极限。以安培平方秒(A²s)为单位,此极限为:gydF4y2Ba
电机I²t极限= 0.0004 × (gydF4y2Bamotor.current.overdrive.maxgydF4y2Ba²-gydF4y2Bamotor.current.continuous.maxgydF4y2Ba²)gydF4y2Ba |
(2)gydF4y2Ba |
一组类似的三个设置描述了驱动器的电流极限和I²t积分极限(以A²s为单位):gydF4y2Ba
- driver.current.continuous.maxgydF4y2Ba:驱动器连续限流gydF4y2Ba
- driver.current.overdrive.maxgydF4y2Ba:驾驶员超速(瞬时峰值)电流极限gydF4y2Ba
- driver.current.overdrive.durationgydF4y2Ba:驱动器可以输出其最大超速电流的持续时间gydF4y2Ba
驾驶员I²t极限= 0.0004 × (gydF4y2Badriver.current.overdrive.maxgydF4y2Ba²-gydF4y2Badriver.current.continuous.maxgydF4y2Ba²)gydF4y2Ba |
(3)gydF4y2Ba |
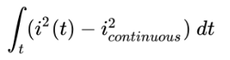
考虑这些限制的一种方法是“如果需要施加恒定电流,那么电流可以持续多长时间?”或者,“如果我必须在给定的时间内施加恒定的力,我能驱动多大的电流?”这两个问题的答案都可以从下面的I²t曲线中推断出来。请注意,根据驱动器和电机属性的不同,在某些情况下,驱动器设置可能更有限制,而在其他情况下,电机设置可能更有限制。不幸的是,现实世界中的电机电流过于复杂和动态,对于I²t图来说,无法提供任何详细的见解,但这张图对于建立一些基本的直觉是有用的。gydF4y2Ba
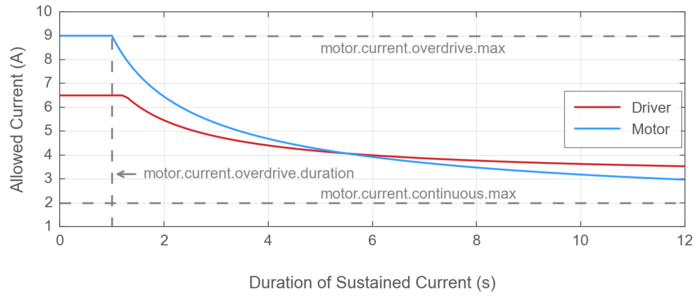
图2:I²t曲线示例,显示持续电流的持续时间如何随电流大小而变化。gydF4y2Ba
到目前为止所描述的六个设置定义了驱动器和电机的绝对限制,并且不可修改。轴伺服控制器可能使用的实际连续和超速电流可以使用以下两个设置进行调节,只要它们坚持绝对限制:gydF4y2Ba
- driver.current.continuousgydF4y2Ba:伺服控制器连续输出的最大电流gydF4y2Ba
- driver.current.overdrivegydF4y2Ba:伺服控制器在短时间内可输出的最大电流gydF4y2Ba
注意,如果gydF4y2Badriver.current.continuousgydF4y2Ba调整到驾驶员和电机的绝对极限以下,则新的值将覆盖公式2或公式3中驾驶员或电机的连续电流极限中较低的值。这确保了改变连续电流限制不会影响超速电流可能交付的持续时间。gydF4y2Ba
驱动器或电机型号相对于其极限所消耗的I²t的百分比可以通过以下两个诊断设置查询:gydF4y2Ba
超速复苏gydF4y2Ba
大多数时候,直线电机或音圈定位器的轴驱动器将提供电流高达gydF4y2Badriver.current.overdrivegydF4y2Ba为达到弹道位置、力或扭矩目标设定点所需。轴驱动器保持独立的I²t计算,以监测驱动器的每个阶段和电机的每个阶段的多余热(“超速”)能量,而每个电机阶段的电流上升高于或低于各自模型的连续极限。如果在I²t模型中测量到的任何驱动器阶段或任何电机阶段的多余热能超过了超速能量限制,轴驱动器启动超速恢复响应。gydF4y2Ba
在I²t的一些实现中,通常会将电机电流抑制到连续极限(在Zaber的情况下,这将是gydF4y2Badriver.current.continuousgydF4y2Ba),一旦超过I²t积分极限。这种方法的主要缺点是,随着电机的推力或扭矩的降低,轴可能偏离其计划的轨迹,并可能达到不希望或危险的位置。其他的I²t实现完全禁用驱动器,并允许电机滑行到停止,放弃对执行器的控制。然而,Zaber控制器将首先尝试使用full来控制电机的停止gydF4y2Badriver.current.overdrivegydF4y2Ba如果需要的话。如果受控停止尝试导致I²t积分进一步增加到略高的次要I²t极限以上,则停止尝试。在控制停止尝试后,轴驱动器最终被允许为故障轴节流回伺服电流。gydF4y2Ba
图3:详细查看Zaber级上的超速故障响应。注意,被测电机I²t积分(gydF4y2Bamotor.i2t.measuredgydF4y2Ba)在高电流时期上升,在低电流时期缓慢下降。电流不节流立即超过超速限制,但只有在轴来一个控制停止。gydF4y2Ba
在检测到超速限制故障时,控制器会引发一个gydF4y2Ba超速限制(FR)gydF4y2Ba属性清除之前将一直存在的警告标志gydF4y2Ba明确的警告gydF4y2Ba命令。此外,运动命令将被拒绝的原因OVERDRIVELIMIT,直到驾驶员和电机的I²t模型已经冷却和gydF4y2Badriver.i2t.measuredgydF4y2Ba而且gydF4y2Bamotor.i2t.measuredgydF4y2Ba两者都低于100,持续1秒。gydF4y2Ba
在故障触发停止后的冷却期间,轴将尝试使用相电流减少到保持其位置gydF4y2Badriver.current.continuousgydF4y2Ba.gydF4y2Ba
常用设置修改gydF4y2Ba
禁用超速gydF4y2Ba
在大多数Zaber的线性电机和音圈设备上,超速是默认启用的。在某些应用中,短暂的高可用功率爆发可能不会提供任何有用的好处,因此能够无限期地保持一致的电流限制可能是可取的。最简单的方法就是设置gydF4y2Badriver.current.overdrivegydF4y2Ba在这个到0的轴上。以下示例禁止在设备2的轴1上使用超速电流:gydF4y2Ba
/2 1 set driver.current.overdrive 0 (@02 1 OK IDLE——0gydF4y2Ba
降低超速电流以匹配电源的能力gydF4y2Ba
在某些应用中,空间或成本限制或其他考虑因素可能要求Zaber执行器使用比通常推荐的设备更小的电源供电。在这些情况下,试图爆发的超速,虽然短暂,可能超过电源的能力,导致电源参与其过流保护机制,并完全禁用其输出或降低其输出电压。这将体现在gydF4y2Ba过压或欠压驱动禁用(FV)gydF4y2Ba或者一个gydF4y2Ba电流涌流误差(FC)gydF4y2Ba警告标志,或控制器完全掉电。gydF4y2Ba
为了避免这种情况,应该有可能降低超速电流限制,以匹配电源的能力。请注意,电源电流没有一对一的映射到电机的相电流。在单相电机上(gydF4y2Ba如。gydF4y2Ba音圈)或三相电机(gydF4y2Ba如。gydF4y2Ba三相直接驱动或无刷直流电动机),供电电流几乎总是小于传递到电机相的电流。详情请见gydF4y2Badriver.current.overdrivegydF4y2Ba.gydF4y2Ba
降低执行器平均发热量gydF4y2Ba
虽然gydF4y2Badriver.current.continuousgydF4y2Ba可能会超过短暂的持续时间,控制超速电流交付的I²t算法确保在很长一段时间内,根均方(RMS)电流在轴上的任何电机相位保持在以下gydF4y2Badriver.current.continuousgydF4y2Ba.结果,gydF4y2Badriver.current.continuousgydF4y2Ba设置本质上控制一个轴的稳态散热。为了限制驱动器的平均发热量,我们可以保持gydF4y2Badriver.current.overdrivegydF4y2Ba同样,简单地减少gydF4y2Badriver.current.continuousgydF4y2Ba.执行器的峰值推力或扭矩将保持不变,但连续的推力或扭矩将成比例地减小。gydF4y2Ba
修改允许超速电流的持续时间gydF4y2Ba
这在Zaber的ASCII协议中是不可能实现的。设备的电流限制可以降低,但一旦由产品配置定义,驱动器的超速能量限制将相对于其原始连续限制保持不变。若要更改设备的允许超速持续时间(以及能量限制),请联系gydF4y2BaZaber技术支持gydF4y2Ba.gydF4y2Ba
本文的内容和观点仅为作者个人观点,并不代表robotictomorrow的观点半岛app官网gydF4y2Ba

Zaber科技公司gydF4y2Ba
Zaber的广泛的计算机控制电动线性幻灯片,微型线性执行器,电动旋转工作台,电动镜面安装,测角仪和其他设备,使自动化亚微米定位应用快速,简单,实惠。gydF4y2Ba
其他文章gydF4y2Ba
通过集成所有系统组件简化运动控制gydF4y2Ba
与Zaber进行IMTS对话gydF4y2Ba
更多关于Zaber技术公司的信息gydF4y2Ba
评论(0)gydF4y2Ba
这篇文章没有任何评论。第一个在下方留言。gydF4y2Ba
特色产品gydF4y2Ba

