跳到内容
<\/path><\/svg>","library":"fa-solid"},"toggle":"burger"}" data-widget_type="nav-menu.default">
资源
视频教程
文档
社区
博客
不和
合作伙伴
ADLINK
AAEON
英伟达
se工作室
神经铸造
漫游者机器人半岛app官网
新闻
你的项目
关于
菜单
资源
视频教程
文档
社区
博客
不和
合作伙伴
ADLINK
AAEON
英伟达
se工作室
神经铸造
漫游者机器人半岛app官网
新闻
你的项目
关于
请求一个演示
登录
云机器人平台半岛app官网
一个统一的方式开发、部署和管理机器人和舰队。
请求一个演示
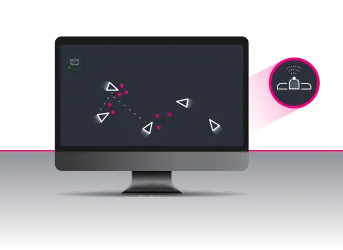
Low-Code
发展
平台
我们的平台让你ROS旅程直观使用拖放工具和一组丰富的现成的人工智能算法如对象识别、导航和路径规划ROS1/2兼容。
你可以很容易地设计、开发和测试你的机器人,允许您创建自定义的行为根据您的独特需求。
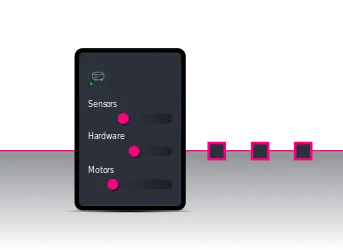
控制、监控
和管理
Teleoperate机器人,监测和记录传感器信息在世界任何地方与一个可定制的仪表板。监控单个机器人或机器人的舰队,获得远程访问,并显示各种类型的信息:数据流,性能分析、故障诊断等。
多个模拟Envoirments
我们的仿真工具为公司提供了强大而灵活的解决方案在不同的行业。与灵气3 d模拟浏览器,你可以轻松地创建和运行模拟机器人及其行为,允许您测试和评估新设计,火车运营商,并预测你的机器人在不同条件下的性能。
我们的模拟环境友好和可定制,以满足您的独特需求。
我们的平台支持ROS 1/2通过提供一个桥梁,让ROS 1/2节点通信。这使开发人员能够利用现有的ROS的生态系统,图书馆,和工具而受益于该平台功能。使用我们的平台,开发人员可以创建ROS节点和无缝集成到他们的机器人应用程序。
学习如何连接现有的ROS项目或创建自己的机器人应用程序从头开始!
快速教程
播放视频
等等,还有更多:
灵气异常检测监控实时行为,识别偏差,并警告潜在的故障或风险
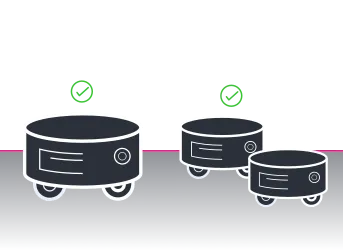
车队管理、监视和管理任务
通过云终身机器人软件升级和支持
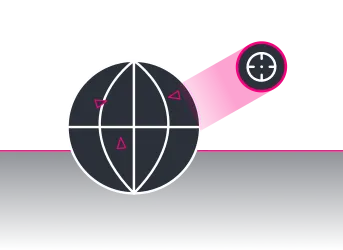
GPS定位准确确定实时位置的机器人在世界任何地方
部署配置一个机器人或整个舰队的机器人通过单击一个按钮
图书馆丰富的算法、驱动程序和传感器(激光雷达,深度照相机和更多)
的信任
新闻和更新
2023年7月23日
Shauli扎克
SafetyDetectives耶胡达博士与Elmaliah灵气,基于云计算的机器人系统,网络安全,人工智能与自主机器人的影响,等等。半岛app官网
在确保网络安全起着关键作用的安全自主机器人,包括两个主要方面。首先,把机器人当做电脑和实施网络安全措施保护他们是至关重要的。同样有效的网络安全解决方案用于电脑可以应用于机器人。
阅读更多
2023年5月29日
Ari Yakir
开发一个多机器人环境与NVIDIA艾萨克Sim, ROS和灵气
需要一个高保真多机器人仿真环境正在迅速增长,越来越多的自主机器人被部署在真实世界的场景。在这篇文章中,我将回顾我们过去在Cogniteam用于模拟多个机器人,与NVIDIA艾萨克Sim我们目前的进展,灵气如何加快开发和维护的多机器人仿真与以撒Sim卡。
阅读更多
2023年4月9日
Elisa穆尼奥斯
Elisa穆尼奥斯主机耶胡达博士Elmaliah在本周Builder的播客
在这个播客耶胡达博士Elmaliah讨论找到理想的软件解决方案的重要性一个机器人,因为它可以极大地影响它的性能和功能。一个好的软件解决方案应该是易于使用,提供实时数据分析,允许定制,和有一个用户友好的界面。他还强调了需要考虑的因素,如可伸缩性和与其他系统的集成。
阅读更多
所有新闻和更新
关于Cogniteam
体验。知识。专家解决方案。
我们发展人工智能技术为机器人十多年,使用映射的蓝筹股公司,导航和自主决策。
我们已经包装独特的算法套件一起作为一个平台,让你一个独特的基于云的人工智能机器人解决方案在一个易于使用的地方。
关于我们
资源
视频教程
文档
社区
博客
不和
合作伙伴
ADLINK
AAEON
英伟达
se工作室
神经铸造
漫游者机器人半岛app官网
新闻
你的项目
关于
请求一个演示
登录
今天取得联系。
部门
学院
自治和自动化
农业
半岛app官网
软件
零售
制造业
仓库&交付
其他
普通询盘
讨论你的研发项目
合作
请求一个回电
提交
map