在自动化的世界里,可以有一线之隔什么被认为是运动控制器和代表一个基本的伺服驱动。关键是理解每个设备的功能和智能。gydF4y2Ba
 有什么区别一个伺服电机和运动控制器吗?gydF4y2Ba
有什么区别一个伺服电机和运动控制器吗?gydF4y2Ba

Kollmorgen工程团队|gydF4y2BaKollmorgengydF4y2Ba
伺服系统gydF4y2Ba
伺服电机是由伺服驱动器,供应电压和电流电机线圈,然后显示器关闭伺服回路的反馈。在大多数情况下,伺服驱动包含三个嵌入式伺服回路——当前(或转矩)循环,速度环和位置环,相互作用创造精密运动。预期的电动机操作将确定哪些循环是必需的。gydF4y2Ba
在转矩控制应用程序中,只需要一个特定的扭矩,电流环是必要的。由于转矩电流成正比,扭矩是由一个传感器,提供电流反馈伺服驱动。gydF4y2Ba
与速度控制应用程序,通常发现电流和速度循环。速度回路监控伺服驱动的速度传感器提供的信息,然后使用这些数据来调整当前的循环来增加或减少扭矩。gydF4y2Ba
最后,位置环的应用程序使用了一个反馈传感器耦合的电机将位置信息发送给伺服驱动器或运动控制器,进而信号速度循环来增加或减少速度,然后传递到当前的信息循环调节转矩。gydF4y2Ba
定义角色的驱动器和控制器gydF4y2Ba
在转矩控制的无刷直流伺服电机,一个“设备”供应电流和电压电机基于命令的输入来衡量当前的反馈。设备提供电源的电动机,在适当的术语中,伺服放大器或服务器。电流或转矩驱动是无用的,除非它收到一个特定的命令来告诉它产生转矩。命令可以来自各种来源,主要是作为“控制器”。命令可能会像一个人一样简单,功能作为一个控制器,手动调整电位器+ 10 v直流信号应用于驱动基于期望的输出转矩。gydF4y2Ba
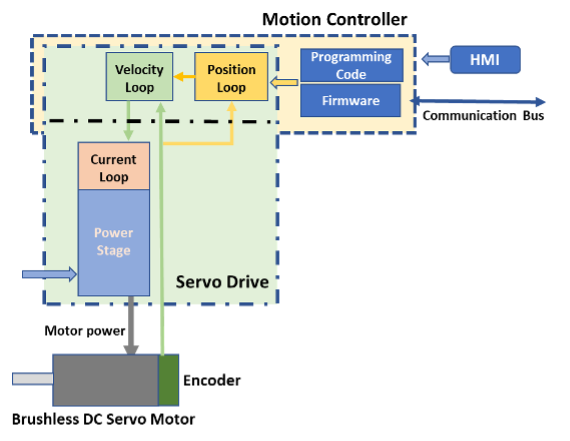
在一个典型的无刷直流伺服系统,三个嵌入式循环与各种补偿和滤波元素存在。内循环(电流环)是由速度控制的循环,进而由位置环控制。当前循环始终驻留在开车,速度和位置环位于驱动器或控制器。当前循环使用电动机电流传感器测量电机绕组的电流,而速度循环使用一个速度传感器(通常是一个编码器)测量电动机的速度,也提供位置信息关闭位置环。gydF4y2Ba
运动控制器是基于微处理器的设备复杂的算法,生成脉冲宽度调制(PWM)波形。在伺服驱动功率晶体管转移激励电机的电流和电压波形。运动控制器通常过程从不同的伺服回路的反馈信息。控制器利用反馈信息来整流马达精确指挥的微处理器。本质上,提供的智能微处理器作为控制器,而电子与电力设备充当开车。基本上,一个控制器是适用于一个特定的元素命令一个位置,速度,或电流环路,而电机的电压和电流驱动提供了所要求的控制器。gydF4y2Ba
控制器通常是一个可编程设备,由程序员提供存储和运行代码。编程开发在各种语言中,如基本的C + / c++, VB和语言中指定的IEC 61131 - 3标准。控制器有很多安全元素来防止过载或停止运动事件的组件故障。驱动器,另一方面,倾向于接受的输入命令控制器和开关功率晶体管。这将创建所需要的电流和电压满足命令转矩和速度。gydF4y2Ba
随着微处理器和新的开关设备的进步,控制器和驱动器越来越交织在一起——主要是集中式系统中所有的电子产品都集中在一个控制柜。在分散的解决方案中,运动控制器驻留在内阁在驱动器配置附近的汽车和与集中式通信通过一个运动现场总线运动控制器。gydF4y2Ba
关于作者gydF4y2Ba
本文在一个团队中合作的运动并在Kollmorgen自动化专家。请联系Kollmorgen问题gydF4y2Bainfo@kollmorgen.comgydF4y2Ba。gydF4y2Ba
内容与本文作者的意见,不一定代表RoboticsTomorrow的观点半岛app官网gydF4y2Ba
评论(0)gydF4y2Ba
这篇文章没有任何评论。成为第一个在下面留下你的评论。gydF4y2Ba
特色产品gydF4y2Ba

