多路径干扰飞行时间面临的最大挑战之一相机。在本文中,学习多路径干扰是什么意思,3方法可以最小化。gydF4y2Ba

Prabu Kumar |gydF4y2Bae-con系统gydF4y2Ba
飞行时间(ToF)相机是强大的嵌入式视觉解决方案,提供实时深度测量,主要需要自主和引导导航的应用程序。正如你可能知道,ToF传感器使用光照明的技术深度的测量基于时间发出的光从目标对象回来。gydF4y2Ba(了解更多关于这项技术是如何工作的,请访问gydF4y2Ba什么是飞行时间传感器?飞行时间相机的关键部件是什么?gydF4y2Ba)。gydF4y2Ba为了实现这一目标,整个现场之前必须照明光和反射测量之间的差异。然而,这些相机有绊脚石深度测量称为多路径干扰(或多路径反射)来克服。在这个博客,让我们看看多路径干扰意味着什么,以及如何克服它,以确保高的性能gydF4y2Ba飞行时间的相机gydF4y2Ba。gydF4y2Ba
多路径干扰是什么?为什么它是重要的飞行时间相机?gydF4y2Ba
ToF传感器操作基于每个像素是一个光学的理论路径。然而,在实际情况下,多个照明路径(光源)会映射到相同的像素。这就是所谓的多路径干扰。这可以证明是非常不利于ToF相机,因为它可能导致激烈的测量不准确。,简而言之,被反射的光从附近的目标对象和其他对象之前相机传感器。它导致多条路径的照明——影响深度估计。gydF4y2Ba
下面的图说明了多路径干扰发生时:gydF4y2Ba
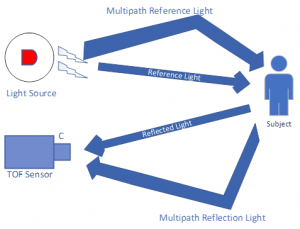
图1 -多路径反射gydF4y2Ba
这四个例子多路径干扰可能是:gydF4y2Ba
- 镜面相互反射在现场——这通常发生在一个不透明的物体阻碍的道路光束传感器。gydF4y2Ba
- 半透明的物体——这是由于存在一个半透明的物体或表面场景中。gydF4y2Ba
- 多界面反射(或扩散相互反射),有多个障碍物时会多界面反射光线的路径。这种现象更容易发生当对象放置在多个2 d或3 d飞机。这也可以发生在目标对象的纹理是不均匀的。gydF4y2Ba
- 重影或眩光——重影的现象是不同的镜头元素——甚至反射光传感器,当光从一个自然或人工源直接落在他们。gydF4y2Ba
现在让我们试着去理解这个概念用一个实际例子。考虑一个ToF相机放在一个表如下图所示:gydF4y2Ba
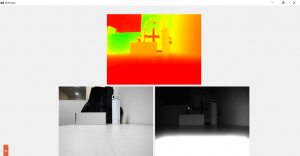
图2 -多路径反射引起的相机放在一个表(图片来自相机的角度)gydF4y2Ba
当TOF相机放在桌子上面的图所示,从表中由于反射表面在光的路径,深度映射是完全受到影响。正如你所看到的,甚至远对象喜欢墙上场景中显示为红色(红色表示对象近相对于场景中的其他对象)。以来,在这些场景中,几个光学路径并列在一个像素,深度测量的显著影响。业内专家也认为这是一个错误的主要原因甚至最先进ToF传感器。gydF4y2Ba
3多路径干扰最小化的方法gydF4y2Ba
多路径干扰是一项具有挑战性的问题,因为它涉及到多个光路径的组合。它是几乎不可能完全缓解。然而,有方法可以最小化,以确保最大的准确性gydF4y2Ba飞行时间的相机gydF4y2Ba。让我们看看这些方法在这一节中详细。这包括设置目标场景的方式干扰最小化。下面的步骤可以设置相机时这样做。gydF4y2Ba
- 你确定这个职位之前,确保任何在附近明亮的对象删除。如果不可避免,例如,一个明亮的固定表面上,您可以使用一个合适的三脚架的相机在一个高水平。请看看下面的图像理解的差异可以:gydF4y2Ba
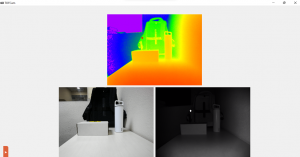
图3 -多路径干扰最小化和相机放在三脚架(图片来自相机的角度)gydF4y2Ba
在上面的设置,相机放在三脚架上。在深度图中,我们可以看到不同的颜色表示不同的深度相同的场景。gydF4y2Ba
- 确保相机不是放在任何半透明的物体或在角落里。这有助于避免偏差的光路。gydF4y2Ba
- 通过选择镜头专门为ToF传感器与涂料和过滤器,将有助于减少眩光造成的多径干扰。gydF4y2Ba
e-con系统开发一个飞行时间相机吗?gydF4y2Ba
引用gydF4y2Ba
这个内容最初e-con系统的网站上发表。这里转载e-con系统的权限。gydF4y2Ba
内容与本文作者的意见,不一定代表RoboticsTomorrow的观点半岛app官网gydF4y2Ba
评论(0)gydF4y2Ba
这篇文章没有任何评论。成为第一个在下面留下你的评论。gydF4y2Ba
特色产品gydF4y2Ba

