我们最新的动手指南描述了如何通过考虑各种因素,如应用程序的环境和场景中的目标对象属性,来优化飞行时间的好处。gydF4y2Ba
 飞行时间锻造前进:设计提示,以提高3D性能和削减集成时间和成本gydF4y2Ba
飞行时间锻造前进:设计提示,以提高3D性能和削减集成时间和成本gydF4y2Ba

b|的白皮书gydF4y2BaLUCID视觉实验室gydF4y2Ba
您是否想知道如何提高您的3D飞行时间成像应用程序的性能,同时减少您的集成时间和成本?我们最新的动手指南描述了如何通过考虑各种因素,如应用程序的环境和场景中的目标对象属性,来优化飞行时间的好处。gydF4y2Ba
里面有什么:gydF4y2Ba
•户外vs受控环境gydF4y2Ba
•目标和相机运动gydF4y2Ba
•高光,漫射和透明目标gydF4y2Ba
•场景复杂性简化gydF4y2Ba
•工作距离考虑gydF4y2Ba
•把它们放在一起gydF4y2Ba
示例第3章:“镜面和漫射目标”gydF4y2Ba

图像组4gydF4y2Ba
不同物体的各种点云示例。gydF4y2Ba
一个洋葱。gydF4y2Ba
b.纸板箱gydF4y2Ba
c.黑色PVC管gydF4y2Ba
d.白色PVC管gydF4y2Ba
具有漫射表面和高反射率的目标最适合ToF(图集4,例a, b, d)。这些目标将足够的光发送回ToF传感器,没有镜面反射。然而,有些物体表现出不太理想的特性,但在场景中仍然可以识别。在这些情况下,可以通过改变曝光时间和增益、图像积累和滤波来增加目标细节。gydF4y2Ba
曝光时间和增益gydF4y2Ba
确定最佳曝光时间可使高反射率和低反射率目标的可用深度数据最大化。Helios相机支持两种独立的曝光时间设置- 1000µs和250µs,以及高增益和普通增益设置。1000µs设置是默认曝光时间,也是允许的最大曝光时间。较长的曝光时间和高增益应用于距离相机较远的场景,或成像具有低反射率的物体时。较短的曝光时间和正常增益用于距离相机较近的场景,或出现过度饱和的物体。gydF4y2Ba
| 曝光时间gydF4y2Ba | 获得gydF4y2Ba | 最好的…gydF4y2Ba |
| 1000µ年代gydF4y2Ba | 高gydF4y2Ba | 黑暗的物体,更远的距离gydF4y2Ba |
| 250µ年代gydF4y2Ba | 正常的gydF4y2Ba | 高度反射的物体,更近的距离gydF4y2Ba |
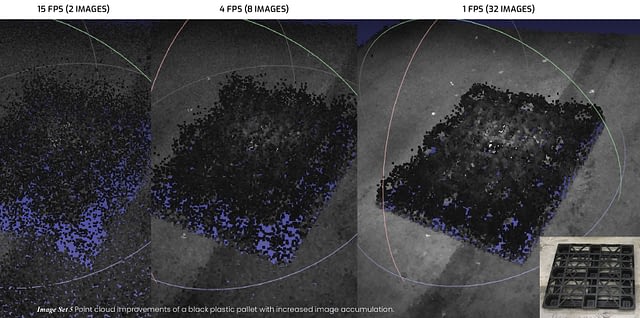
形象积累gydF4y2Ba
Helios处理管道能够累积多帧以改进深度计算。这对产生噪声数据的目标很有帮助。通过图像积累,深度帧在一定数量的帧上平均,从而改善成像结果。需要注意的是,累积的帧数越多,深度数据生成越慢,因为必须捕获更多的图像来计算数据。gydF4y2Ba
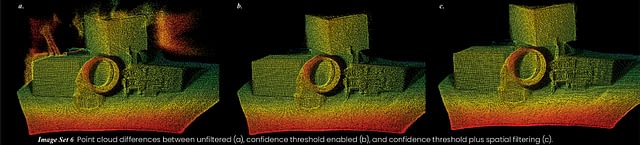
信心阈值gydF4y2Ba
深度数据置信度基于每个点的强度水平。如果返回信号太弱,则得到的深度数据的置信度很低。阈值去除低强度/置信度的深度数据,提高场景清晰度。gydF4y2Ba
空间滤波gydF4y2Ba
空间滤波通过调整和平均相邻像素之间的深度数据差异来减少噪声-平滑表面。此外,Helios相机还在其空间滤波中使用边缘保存,在保持物体边缘清晰度的同时减少表面的噪声。gydF4y2Ba
请按此下载完整的飞行时间指南PDFgydF4y2Ba
本文的内容和观点是作者的,并不一定代表roboticstomorow的观点半岛app官网gydF4y2Ba
评论(0)gydF4y2Ba
这篇文章没有任何评论。请第一个在下面留言。gydF4y2Ba
特色产品gydF4y2Ba

