作为瑞士苏黎世联邦理工学院的一个重点项目的一部分,八个本科学生建立了一个飞行操纵国可以悬停在任何方向和把握对象。无人机比quadrocopter和容易操作的设计,目的是推动空中机器人到新的高度。半岛app官网gydF4y2Ba
 飞行机器人指明了道路gydF4y2Ba
飞行机器人指明了道路gydF4y2Ba

文章从|gydF4y2Bamaxon集团gydF4y2Ba
一个仓库运输包装的飞行机器人。许多发明家都试图把这个未来的憧憬intralogistics变成现实的装备与连环爪臂轴飞行器。迟缓,但这种drone-plus-arm组合预测的手臂造成不利的重量分布影响精度和承载能力。此外,轴飞行器只能在水平面旋转,这意味着所谓的终端执行器——在这种情况下,钳子,不能在所有的方向。目前,大多数无人机目前仍局限于检查任务。gydF4y2Ba
去年秋天,一个学士学生团队在瑞士苏黎世联邦理工学院的机械工程和过程工程有了一个主意开发一个集成的飞行机器人不受这些缺点。年轻的工程师解决重点项目,投标的自治系统实验室(ASL),并建立了一个全向飞行操纵国——换句话说,一个装置,是身体与周围环境交互的能力。gydF4y2Ba

灵感来自一个3 d打印机gydF4y2Ba
创建一个高精度的终端执行器,学生们安装了一个线性平行臂定位是通过三个幻灯片移动棱镜结构内。年轻的创新者Prismav -棱镜微型飞行器装备四个不同的对齐的驱动器,每个组成的两个螺旋桨旋转相反的方向。这个平衡个人的时刻螺旋桨和提供稳定的飞行行为。gydF4y2Ba
δ手臂的灵感来自3 d打印机的内部。马提亚卢比奥,机械工程学生,解释道:“我们是站在前面的3 d打印机,打印机的想法使用内部结构来构建一个飞行平台,结合飞行和操作。“这是一种新方法,这种飞行操纵的三角洲的手臂仍然是罕见的。gydF4y2Ba
平行臂补偿定位错误gydF4y2Ba
转子组可以绕自己的轴旋转。这使得7.5公斤的飞行物体盘旋在任何方向。在重点项目,全方位无人机是房间内配备了一个视觉运动跟踪系统,确保准确的测量位置和对齐。这使得Prismav能够与周围环境互动和定位精度的钳子。两个电池容量为20000毫安时提供一个飞行时间约12分钟。gydF4y2Ba

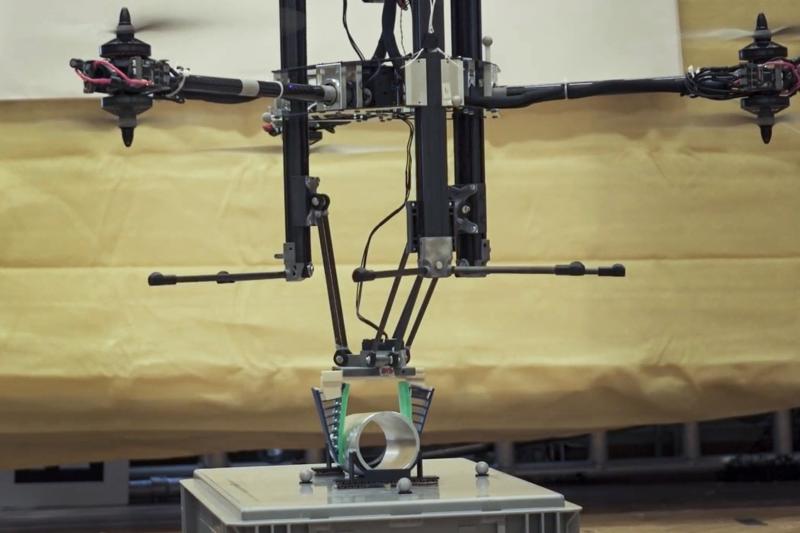
8名学生(7在机械工程和电子工程)的狮鹫队伍欢呼成功后飞行运输500 g的汽缸。gydF4y2Ba
剩下的不精确的飞行动作的范围通常在10 - 15厘米。为了补偿这一点,三爪臂无刷电机maxon准确位置。三个幻灯片,继续线性指南,都单独定位通过齿形带。有了这个系统,夹具可以达到显著的三维空间中的任何位置。力的前提下尽可能地节省重量,团队选择了紧凑连成一片扭矩22 M驱动器。gydF4y2Ba
对危险的或难以接近的区域gydF4y2Ba
与学生建立Prismav进一步研究的基础。马提亚卢比奥补充说:“我们证明了飞行操纵国可以控制,运输,和放下一个500 g气缸通过与其环境相互作用。“关键是夹持臂补偿定位错误比无人机行动快。gydF4y2Ba
重点项目,于2021年提出,会见了伟大的响应。因此,学生现在继续发展Prismav学士项目的一部分。优化自动定位,飞行路径计算和控制软件,集成一个直观的控制器。这是有道理的,因为潜在的应用范围是巨大的。例如,飞行机器人可以在未来执行在难以接近的或危险的工作地点:收紧螺丝,设置脚手架,修理高压线路,甚至建筑雪崩保护结构。gydF4y2Ba
内容与本文作者的意见,不一定代表RoboticsTomorrow的观点半岛app官网gydF4y2Ba

maxon集团gydF4y2Ba
maxon领先供应商的高精度直流电刷无刷伺服电机和驱动器。这些汽车的大小范围从4 - 90 mm,可达到500瓦。我们把电动马达、齿轮和直流电机控制到高精度、智能驱动系统可定制,以适应客户的特定需求的应用程序。gydF4y2Ba
![]()
![]()
![]()
![]()
![]()
其他文章gydF4y2Ba
Mirokai,机器人技术的一场革命半岛app官网gydF4y2Ba
MiniMACS6稳定Furuta摆gydF4y2Ba
为什么自主移动小车需要可靠的汽车吗?gydF4y2Ba
更多关于maxon集团gydF4y2Ba
评论(0)gydF4y2Ba
这篇文章没有任何评论。成为第一个在下面留下你的评论。gydF4y2Ba
特色产品gydF4y2Ba

