如果你是一个投资者,商业领袖,或技术用户寻求了解你们的技术投资,这篇文章是给你的。下面是解释vision-guided机器人和深度学习算法。半岛app官网gydF4y2Ba
 视觉引导机器人和人工智能:非半岛app官网技术的一个解释gydF4y2Ba
视觉引导机器人和人工智能:非半岛app官网技术的一个解释gydF4y2Ba

文章从|gydF4y2BaFizyrgydF4y2Ba
自动化行业正在经历一场爆炸增长和技术能力。解释复杂的技术,我们使用术语如“人工智能”传达的是比以往任何时候都更有能力和先进的解决方案。如果你是一个投资者,商业领袖,或技术用户寻求了解你们的技术投资,这篇文章是给你的。下面是解释vision-guided机器人和深度学习算法。半岛app官网gydF4y2Ba
没错,这篇文章的标题是“人工智能”第一段结束时,我们已经转向深度学习算法!行业炒作努力说服你,“人工智能=先进的和有价值的”而“深度学习”=书呆子和易怒的。如果你是一个视觉(必要)工程师设计自己的解决方案,本文将很有趣。如果你是一个商业领袖想要了解基本知识,这是为你写的。gydF4y2Ba
视觉系统类型用于仓储和分销环境gydF4y2Ba
有三个类型或视觉系统用于仓储和配送的主要应用程序环境。他们正在检查和映射,拾起并定位没有深度学习,并与深度学习拾起并定位。所有类型的视觉系统包括三个主要元素:一个输入(相机),一个处理器(计算机程序),和一个输出(机器人)。所有类型可以使用类似的摄像机和机器人。程序的区别。gydF4y2Ba

检查和映射gydF4y2Ba
视觉系统检查用于各种工业机器人的应用程序,提供输出的“通过/失败”,“存在/不存在”,或测量值。结果决定下一步流程。一个例子是使用视觉系统制造细胞检查数量,颜色,或其他预定义的属性(如3个红球,1黄,2蓝色)。结果传达给外部处理系统,一套规定的预先确定的行动。gydF4y2Ba
测绘系统不太常用,但类似于检查系统,在这一愿景地图不直接转化为机器的行动。一个例子就是vision-navigation-based移动机器人(例如,Seegrid)。地图创建并存储在数据库中。所需的路线预计算。当机器人驾驶通过系统沿着预定程序的路径,机器人视觉系统能够确定x - y位置已知的地图上。外部路由算法提供了指示机器人(继续前进,左转等)使用已知的地图和现场相机饲料。gydF4y2Ba
检查和测绘系统是非常复杂的,包括指导移动机器人的路由算法,但它们不需要深入学习或人工智能。gydF4y2Ba
拾起并定位,没有学习gydF4y2Ba
拾起并定位视觉系统部署安装今天大多数机器人细胞。一个典型的应用程序是有限的选择和在制造业环境变量。例如,挑选一部分A、B或C从定义的区域并将其设置为一个定义的区域。这些系统可以区分对象和背景基于简单的特性,比如:形状、大小和颜色。摄像机直接通过闭环反馈机器人的运动,使机器人能够迅速、准确地操作,在规定的参数。gydF4y2Ba

这些系统没有一个“学习循环”,使系统更聪明今天比编程。他们天生一组固定的对象和指令。虽然这些系统是“智能”,他们不加智力或学习。gydF4y2Ba
相比之下,这就像拥有一个自动驾驶汽车,只能在天气和已知的道路和交通状况,已经安排好的。汽车可以加速和减速,变换车道,停在灯…但如果修建新的公路,汽车就不能开车。那会是很棒的技术?肯定的。会有局限性吗?是的。gydF4y2Ba
深度学习(也称为人工智能)gydF4y2Ba
最复杂的视觉系统采用“深度学习”。这些系统常常被描述与耸人听闻的术语如“人工智能”。进一步复杂化的事情,许多问题系统销售好像有智能(学习)能力,导致混乱。深度学习系统的类型或子集“人工智能”。gydF4y2Ba
深度学习工程师使用少量的对象作为学习基础和教计算机程序(算法)来识别一个广泛的对象基于小样本的特征。例如,如果你能认出几个类型的停车标志,您可以应用这些知识认识到许多类型的停车标志。gydF4y2Ba
深度学习计划学习功能独立的对象,所以它可以广泛推广的对象。例如,通过这样的一个程序,机器人可以识别一个物体的边缘无论相机的曝光或照明条件。gydF4y2Ba

深度学习系统不依赖于一个单一变量,比如颜色,因为一些简单的作为一个接触改变或照明会破坏结果。颜色可能是其中的一个变量,但额外的更抽象的变量是用于目标识别的深度学习计划。gydF4y2Ba
相比之下,这些深度学习系统用于机器人选择应用程序就像驾驶一辆Tesla完全自治模式。公园和导航从A到B的任何地方,使用最好的旅游路线(大部分)任何天气条件,在所有道路类型。gydF4y2Ba
深度学习系统的基本构建块gydF4y2Ba
深度学习原则所使用的工业机器人和特斯拉自动驾驶汽车是相似的。自动驾驶汽车识别不同形状、大小、颜色和位置停止的迹象。一旦确定为停车标志,算法计算基于外部变量的响应,如位置和运动方向的其他车辆、行人、道路功能,等等,这些计算必须迅速。gydF4y2Ba

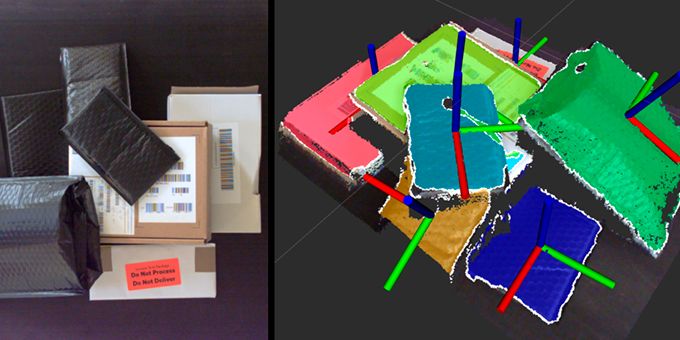
Vision-guided机器人与深度学习项目为工业应用程序识别各种类型的包装、位置和其他变量(例如,部分埋在其他包装)和直接机器行动基于这些变量。自动驾驶汽车相比,为工业机器人的一些变量并不复杂,但潜在的方法学习和迅速反应是相同的。gydF4y2Ba
深度学习解决方案有三个要求:计算机处理能力、高质量的和不同的数据,和深度学习算法。每个需求依赖于另一个。gydF4y2Ba
计算机处理能力gydF4y2Ba
20年前,世界上最大的超级计算机能力的12次浮点运算(每秒12万亿次计算)。超级计算机使用850000瓦的电力,这是足以为几十个家庭提供电力。今天,特斯拉型号S配备10次浮点运算的计算能力!gydF4y2Ba
图形密集的视频游戏的能力在你的特斯拉媒体,我们需要所有的计算能力的真正原因是运行深度学习算法,实现自动驾驶。只有5到10年前,商业开发和部署所需的处理能力深度学习算法供日常使用零售商和制造商并不存在。gydF4y2Ba
数据不仅…更多,但更复杂的变化gydF4y2Ba
深度学习算法变得更好,因为他们遇到更复杂和多样的数据。改进算法依赖于数据的质量,不仅仅是更多的相同。数据(对象)的新变化,并不是类似于现有的已知对象使算法的改进。该算法训练分类新对象基于更深层次的变量。gydF4y2Ba
Fizyr而言,当算法无法正确段对象在当前系统中,消极的例子被用来重新训练模型。这就是是指持续学习。当然,我们的目标是减少负面的例子。gydF4y2Ba
深度学习算法没有门槛,更多的数据(更好、更多样的数据)不再导致性能改善。这就是为什么Fizyr等公司已经部署他们的深度学习算法在商业应用多年,对新的供应商有显著的优势。更多的经验将导致更好的算法,进而导致更好的系统性能。gydF4y2Ba
深度学习算法gydF4y2Ba
算法必须有效最大化可用的数据和处理能力的结合。算法输出由机器执行的指令(机器人或汽车)。gydF4y2Ba
深度学习算法分类数据在很多级别或类别。识别的水平是“深”的学习。使用运动类比:运动,类型的球,现场条件,方向,位置和方向运动的其他球员,球运动,你想要的行动——进球!在学习模式中,深度学习算法计算所有输入变量(每秒一万亿次计算)和指示你努力把球踢低,左脚,导致球旅行网的右上角。分数!gydF4y2Ba

处理能力与智能算法实现速度。拍照,传输数据,进行分类,确定想要的结果,问题可执行指令,在第二次或更少。Fizyr算法提供了超过100的掌握提出了每秒钟,分类处理对象不同,包括质量控制检测的缺陷。不可思议的表现,只能用智能算法和快速的电脑。更好的数据使智能算法。这是一个良性循环。gydF4y2Ba
Fizyr优化vision-guided机器人所需的三个元素。半岛app官网gydF4y2Ba处理能力与高效的优化算法。一个独特的数据集多年建造高质量的数据。智能深度学习算法,训练通过多样的商业应用的经验。gydF4y2Ba
深度学习vision-guided工业机器人视觉系统gydF4y2Ba
商业应用使用机器人来挑选,地方,用托盘装,或de-palletize仓库环境需要三个基本构建块:摄像头,软件,和机器人。摄像机和机器人的眼睛和手臂。软件是大脑。gydF4y2Ba
深度学习算法需要的数据流从摄像机和机器人提供了指导。摄像机和机器人需要适合应用程序,但没有提供情报。所有三个组件都必须共同努力,优化系统性能。gydF4y2Ba
摄像技术gydF4y2Ba
相机技术使高质量的数据流。相机和图像处理后提供的数据准备评估的深度学习算法。虽然摄像机技术是很重要的,在许多方面是与电脑或机器人。有些相机提供更高质量的图像或应用程序更适合,但相机本身不是什么让vision-guided机器人深度学习的能力。相机但不提供数据将数据转化为可操作的命令。gydF4y2Ba
软件gydF4y2Ba
软件是深度学习算法-数据从相机,过程,结果机器人。gydF4y2Ba
机器人末端执行器和gydF4y2Ba
机器人和终端执行器(又名爪)也在系统性能起到至关重要的作用。他们必须提供达到的水平,握力,灵巧和速度所需的应用程序。机器人和终端执行器响应命令的深度学习算法。没有深度学习算法,机器人会预先应对,预先配置的命令。gydF4y2Ba
总结gydF4y2Ba
有三个事情要记得阅读有关人工智能和vision-guided机器人系统:gydF4y2Ba
深度学习算法分类数据在多个级别或类别。gydF4y2Ba
深度学习算法既需要高质量和各种数据。gydF4y2Ba
算法使用它们变得更加强大。经验很重要。gydF4y2Ba
最近相机技术的进步和计算机处理提供了先进的深度学习软件的构建块使人工智能机器人性能的方法。未来已经到来!gydF4y2Ba
作者:约翰涟漪gydF4y2Ba
约翰涟漪的创始人是深奥的员工,一位资深的自动物料搬运行业,和机器人行业顾问公司。半岛app官网职业生涯横跨整个范围:管理、销售、概念和设计,项目管理,和售后支持。涟漪写仓库自动化行业深奥的人员,可以是john@esotericstaffing.com。gydF4y2Ba
内容与本文作者的意见,不一定代表RoboticsTomorrow的观点半岛app官网gydF4y2Ba
评论(0)gydF4y2Ba
这篇文章没有任何评论。成为第一个在下面留下你的评论。gydF4y2Ba
特色产品gydF4y2Ba

