如果您是一名投资者、商业领袖或技术用户,希望了解您正在投资的技术,那么本文就是为您准备的。下面是对视觉引导机器人和深度学习算法的解释。半岛app官网gydF4y2Ba
 视觉引导机器人与人工智能:对半岛app官网非技术的解释gydF4y2Ba
视觉引导机器人与人工智能:对半岛app官网非技术的解释gydF4y2Ba

文章来自b|gydF4y2BaFizyrgydF4y2Ba
自动化行业正在经历增长和技术能力的爆炸式增长。为了解释复杂的技术,我们使用诸如“人工智能”之类的术语来传达解决方案比以往任何时候都更强大和先进的想法。如果您是一名投资者、商业领袖或技术用户,希望了解您正在投资的技术,那么本文就是为您准备的。下面是对视觉引导机器人和深度学习算法的解释。半岛app官网gydF4y2Ba
没错,这篇文章的标题是“人工智能”,但在第一段结束时,我们已经转向了深度学习算法!行业炒作努力让你相信“人工智能=先进和有价值”,而“深度学习=书呆子和技术”。如果您是设计您自己的解决方案的视觉(视觉)工程师,那么本文将会很有趣。如果你是一位想要了解基本知识的商业领袖,这本书就是为你而写的。gydF4y2Ba
在仓储和配送环境中使用的视觉系统类型gydF4y2Ba
在仓储和配送环境中使用的视觉系统有三种类型或主要应用。它们是检查和映射,没有深度学习的拾取和深度学习的拾取。所有类型的视觉系统都包括三个主要元素:输入(摄像头)、处理器(计算机和程序)和输出(机器人)。所有类型都可以使用类似的摄像头和机器人。程序就是区别。gydF4y2Ba

检查和制图gydF4y2Ba
用于检测的视觉系统用于各种工业机器人应用,提供“通过/不通过”,“存在/不存在”或测量值的输出。结果决定了过程的下一步。例如,在制造单元中使用视觉系统来检查当前的数量,颜色或其他预定义属性(例如,3个红色,1个黄色,2个蓝色)。结果被传达给外部处理系统,该系统采取一组预先确定的操作。gydF4y2Ba
地图系统的使用频率较低,但与检查系统相似,因为视觉地图不直接转化为机器动作。一个例子是基于视觉导航的移动机器人(例如,Seegrid)。映射被创建并存储在数据库中。预先计算出所需的路由。当机器人沿着预先编程的路径通过系统时,视觉系统提供了确定机器人在已知地图上的X-Y位置的能力。外部路由算法使用已知地图和实时摄像机馈送向机器人提供指令(继续前进,向左转弯等)。gydF4y2Ba
检查和绘图系统可能非常复杂,包括引导移动机器人的路由算法,但它们不需要深度学习或人工智能。gydF4y2Ba
随随便便,不学习gydF4y2Ba
如今,大多数安装的机器人单元都配备了拾取-放置视觉系统。典型的应用程序是在具有有限变量的制造环境中选择和放置。例如,将A、B、C部件从指定的区域中取出,放置在指定的区域中。这些系统可以根据形状、大小和颜色等简单特征来区分物体和背景。摄像机通过闭环反馈指导机器人的运动,使机器人能够在规定的参数范围内快速准确地操作。gydF4y2Ba

这些系统没有一个“学习循环”,使系统今天比它被编程的时候更聪明。它们是为一组固定的对象和指令预先编程的。虽然这些系统很“聪明”,但它们不会随着时间的推移而增加智能或学习能力。gydF4y2Ba
相比之下,这就像拥有一辆只能在已知道路上行驶的自动驾驶汽车,以及预先设定好的天气和交通状况。汽车可以加速和减速,改变车道,在交通灯前停车,但是如果新建了一条道路,汽车就不能在上面行驶了。它会是很棒的技术吗?肯定的。它会有其局限性吗?是的。gydF4y2Ba
深度学习(又名人工智能)gydF4y2Ba
最复杂的视觉系统采用“深度学习”。这些系统通常被描述为耸人听闻的术语,如“人工智能”。更复杂的是,许多非学习型系统被推销为具有智能(学习)能力,这导致了混乱。深度学习系统是“人工智能”的一种或子集。gydF4y2Ba
深度学习工程师使用一小部分对象作为学习基础,并教计算机程序(算法)基于小样本的特征来识别广泛的对象。例如,如果你能识别几种类型的停车标志,你就可以应用这些知识来识别许多类型的停车标志。gydF4y2Ba
深度学习程序学习独立于对象的特征,因此它可以在广泛的对象范围内进行推广。例如,通过这样的程序,无论相机的曝光或照明条件如何,机器人都可以识别物体的边缘。gydF4y2Ba

深度学习系统不依赖于单一的变量,比如颜色,因为像曝光变化或照明这样简单的事情都会破坏结果。颜色可能是其中一个变量,但在深度学习程序中,用于对象识别的其他更抽象的变量。gydF4y2Ba
相比之下,这些用于机器人拾取应用的深度学习系统就像在全自动模式下驾驶特斯拉。在任何地方停车,并从A点导航到B点,在(大多数)任何天气条件下,在所有道路类型上使用最佳旅行路线。gydF4y2Ba
深度学习系统的基本构建模块gydF4y2Ba
工业机器人和特斯拉自动驾驶汽车使用的深度学习原理是相似的。自动驾驶汽车可以识别不同形状、大小、颜色和位置的停车标志。一旦识别为停车标志,算法就会根据外部变量计算响应,例如其他车辆、行人、道路特征等的位置和移动方向,这些计算必须快速。gydF4y2Ba

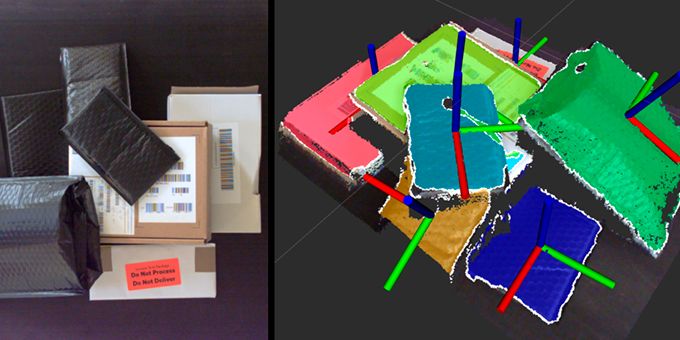
具有深度学习程序的视觉引导机器人用于工业应用,可识别各种类型的包装、位置和其他变量(例如,部分隐藏在其他包装下),并根据这些变量指导机器动作。与自动驾驶汽车相比,工业机器人的一些变量并不复杂,但其学习和快速反应的基本方法是相同的。gydF4y2Ba
深度学习解决方案有三个要求:计算机处理能力、高质量和多样化的数据以及深度学习算法。每个需求都是相互依赖的。gydF4y2Ba
计算机处理能力gydF4y2Ba
20年前,世界上最大的超级计算机每秒可以进行12万亿次浮点运算(每秒12万亿次)。那台超级计算机使用了85万瓦的电力,足以为几十个家庭供电。今天,特斯拉Model S配备了每秒10万亿次的计算能力!gydF4y2Ba
虽然在你的特斯拉上玩图形密集型视频游戏的能力得到了媒体的关注,但我们需要所有计算能力的真正原因是运行能够实现自动驾驶的深度学习算法。仅在5年或10年前,商业开发和部署深度学习算法以供日常零售商和制造商使用所需的处理能力还不存在。gydF4y2Ba
数据……不仅仅是更多的数据,而是更复杂的变化gydF4y2Ba
深度学习算法在遇到更复杂、更多样的数据时会变得更好。改进算法取决于数据的质量,而不仅仅是相同的数据。与现有已知对象不相似的数据(对象)的新变体使算法得到改进。该算法被训练成基于更深层次变量对新对象进行分类。gydF4y2Ba
在Fizyr的情况下,当算法不能正确分割当前系统中的对象时,使用负例对模型进行重新训练。这就是持续学习的意思。当然,我们的目标是减少负面例子的数量。gydF4y2Ba
深度学习算法不存在一个阈值,即更多的数据(更好、更多样化的数据)不再导致性能的提高。这就是为什么像Fizyr这样多年来一直在商业应用中部署深度学习算法的公司比新供应商具有显著优势的原因。更多的经验会带来更好的算法,从而带来更好的系统性能。gydF4y2Ba
深度学习算法gydF4y2Ba
该算法必须高效,以最大限度地结合可用数据和处理能力。算法的输出是机器(机器人或汽车)可以执行的指令。gydF4y2Ba
深度学习算法将数据分为多个层次或类别。识别的水平使其成为“深度”学习。用体育运动来类比:什么运动,球的类型,场地条件,比赛方向,其他球员的位置和运动方向,球的运动,你想要的动作——得分!当处于学习模式时,深度学习算法计算所有输入和变量(每秒1万亿次计算),并指示你用左脚踢低而用力的球,使球飞到网的右上角。分数!gydF4y2Ba

处理能力与智能算法相结合,可以提高速度。在一秒钟或更短的时间内拍摄照片,传输数据,分类,确定期望的结果,并发出可执行的指令。Fizyr算法每秒提供超过100个抓取姿势,通过分类来处理不同的物体,包括检测缺陷的质量控制。这种令人难以置信的性能只有通过智能算法和快速计算机才能实现。更好的数据可以实现更智能的算法。这是一个良性循环。gydF4y2Ba
Fizyr优化了视觉引导机器人所需的三个要素。半岛app官网gydF4y2Ba采用高效算法优化处理能力。多年来建立的高质量数据的独特数据集。智能深度学习算法,通过商业应用的各种经验进行训练。gydF4y2Ba
用于视觉引导工业机器人的深度学习视觉系统gydF4y2Ba
使用机器人在仓库环境中拾取、放置、码垛或拆垛的商业应用程序需要三个基本构建块:摄像机、软件和机器人。相机和机器人是眼睛和手臂。软件就是大脑。gydF4y2Ba
深度学习算法接收来自摄像头的数据流,并向机器人提供指令。摄像头和机器人需要适合应用,但不提供智能。这三个组件必须协同工作以优化系统性能。gydF4y2Ba
摄像技术gydF4y2Ba
摄像技术使高质量数据流成为可能。摄像头和后期图像处理为深度学习算法提供了数据流。虽然摄像技术很重要,但在许多方面它与计算机或机器人相当。有些摄像头可以提供更高质量的图像,或者更适合某个应用,但摄像头本身并不能让视觉引导机器人具备深度学习的能力。相机提供数据,但不将数据转换为可操作的命令。gydF4y2Ba
软件gydF4y2Ba
软件是深度学习算法——数据从相机输入,处理,结果输出给机器人。gydF4y2Ba
机器人和末端执行器gydF4y2Ba
机器人和末端执行器(即抓手)在系统性能中也起着至关重要的作用。他们必须提供的水平达到,握力,灵活性和速度所需的应用。机器人和末端执行器响应来自深度学习算法的命令。如果没有深度学习算法,机器人将对预编程、预配置的命令做出反应。gydF4y2Ba
总结gydF4y2Ba
在阅读人工智能和视觉引导机器人系统时,需要记住三件事:gydF4y2Ba
深度学习算法将数据分为多个层次或类别。gydF4y2Ba
深度学习算法需要高质量和多样化的数据。gydF4y2Ba
算法在使用过程中变得越来越强大。经验很重要。gydF4y2Ba
相机技术和计算机处理的最新进展为先进的深度学习软件提供了构建模块,使机器人的性能接近人工智能。未来已经到来!gydF4y2Ba
作者:John RipplegydF4y2Ba
John Ripple是Esoteric Staffing公司的联合创始人,是自动化物料搬运行业的资深人士,也是机器人公司的行业顾问。半岛app官网他的职业生涯涵盖了行政、销售、概念和设计、项目管理和售后支持。Ripple在Esoteric Staffing网站上撰写有关仓库自动化行业的文章,可以通过john@esotericstaffing.com与他联系。gydF4y2Ba
本文的内容和观点是作者的,并不一定代表roboticstomorow的观点半岛app官网gydF4y2Ba
评论(0)gydF4y2Ba
这篇文章没有任何评论。请第一个在下面留言。gydF4y2Ba
特色产品gydF4y2Ba

