越来越多的机器设计人员被要求构建占用更少空间、运行更低功耗、运行性能更高的系统。值得庆幸的是,运动控制用新的马达、新的传感器和新的架构回应了这一要求。gydF4y2Ba
运动控制变小gydF4y2Ba
Chuck Lewin b|gydF4y2Ba性能运动装置gydF4y2Ba
越来越多的机器设计人员被要求构建占用更少空间、运行更低功耗、运行性能更高的系统。值得庆幸的是,运动控制用新的马达、新的传感器和新的架构回应了这一要求。继续阅读,了解运动控制小型化的最新发展。gydF4y2Ba
介绍gydF4y2Ba
似乎每天都有越来越小的电机、控制器和传感器被用于精确的运动控制。推动这些应用的是对手术、患者治疗、移动机器人、无人机和电池供电应用中使用的运动控制组件的需求不断增长。半岛app官网在本文中,我们将向您介绍运动控制技术的最新发展,这些技术使工程师能够构建功耗更低、噪音更小、占用空间更小的系统。gydF4y2Ba
我们将首先看看电机本身,了解它们是如何发展和吸收新的传感器和控制技术,以提高其性能。然后,我们将重点放在控制上,不仅要展示运动控制组件如何以及为什么在物理上缩小,还要展示如何使用新的控制技术来最大化运动和系统性能。gydF4y2Ba
最后,我们将看看电机和控制的演变如何影响架构。因为事实证明,更小、更高效的控件允许采用全新的方法来确定控件的位置、连接方式以及这些更改如何对性能、可靠性和成本产生重大影响。gydF4y2Ba
微型马达101gydF4y2Ba
图1显示了两个图表,比较了不同类型的电机的两个关键性能指标:功率输出重量和扭矩输出重量。对于给定的应用,通常这两个因素中的一个比另一个更重要,事实上,它们是相关的,因为功率被定义为扭矩乘以旋转速率。gydF4y2Ba
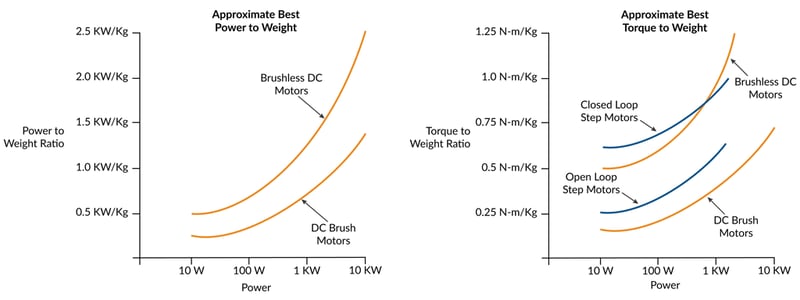
图1:电机类型在两个关键性能指标的比较gydF4y2Ba
如图所示,无刷直流电动机,与他们的能力,产生一个恒定的扭矩到一个高旋转速率,通常提供最高的价值数字的功率输出重量。典型值是直流电刷电机倍率的两倍。步进电机虽然经常用于便携式应用,但通常不属于重量功率的一部分,因为它们的扭矩随着转速的增加而迅速下降。gydF4y2Ba
如果我们想要优化扭矩与重量之比,步进电机又回到了桌面上。传统的开环操作步进电机具有很高的保持扭矩,但其在工作速度范围内提供该扭矩的能力受到其振荡倾向的影响。实际上,这意味着步进电机提供的有效扭矩在电机额定保持扭矩的50%至70%之间。gydF4y2Ba
然而,有一种操作步进电机的替代方法在很大程度上解决了这个问题。一种称为闭环伺服的技术,也称为步进伺服,使用编码器来操作步进电机,就好像它是一个两相无刷直流电机一样。结果是在电机的工作范围内显着更高的扭矩,因为中间范围不稳定,开环步进电机的扭矩杀手,被消除了。本文稍后将详细介绍这一即将到来的技术。gydF4y2Ba
我感觉到了变化gydF4y2Ba
电机/执行器发展的一个有趣方面是它们如何利用(或不利用)传感器。随着电机变得越来越小,随着它们被植入或绑在病人身上或用于移动机器人,在不影响电机封装尺寸或电机/传感器组合的稳健性的情况下添加传感器变得越来越困难。gydF4y2Ba
因此,影响电机的一个趋势是无传感器操作——消除传感器,使用反电动势(用于无刷直流电机)或电子失速检测(用于步进电机)等控制技术来操作电机。gydF4y2Ba
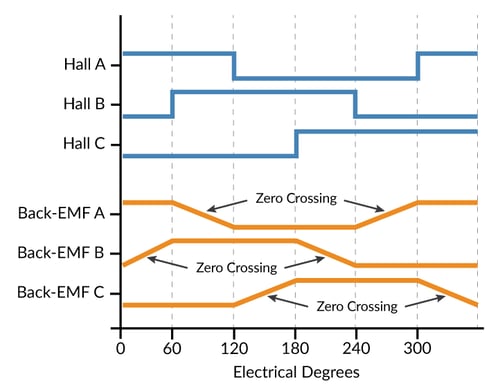
图2:无刷直流电机的反电动势gydF4y2Ba
有一些简单而奇特的方法来利用无刷直流电机每个绕组的反电动势。图2代表了最直接的情况,测量了当其他两条腿被驱动时,一条浮腿的反电动势。浮动支路不再受放大器驱动输出的影响,包含可用于确定过零点的反电动势电压,从而可以确定换相周期的特定位置。gydF4y2Ba
反电动势在适当的情况下工作得很好,但到目前为止还没有在一般运动应用中采用。第一个挑战是,随着电机速度的降低,反电动势信号会消失。因此,对于所有实际用途,无传感器无刷直流应用不能用于定位应用,其中电机需要在固定位置周围控制。gydF4y2Ba
然而,在速度控制应用中,无传感器驱动已被广泛采用。尽管我们仍然存在低速时无法感知反电动势信号的问题,但控制器可以通过使用微步进驱动技术(将无刷直流电动机作为步进电机操作)来克服这一限制,使其达到速度,然后在测量到的反电动势信号提供足够的噪声信号后切换到反电动势换向。gydF4y2Ba
当涉及到步进电机时,无传感器操作或多或少意味着相反。步进电机可以一直定位到零速度,但随着速度的增加,它们需要帮助,因为它们容易失去步骤或运动完全崩溃。无传感器的电子技术可以帮助减少在某些速度下的振荡趋势,并通过检测转子已经停止转动。gydF4y2Ba
然而,同样的“它工作,直到它不”的限制,适用于无传感器无刷直流电机的操作也适用于这里。很难保证电子失速检测将100%可靠地工作,因此真正关键任务的步进电机应用往往使用编码器来确认运动。gydF4y2Ba
当事情变得艰难时,强者会觉察到gydF4y2Ba
奇怪的是,包括非常小的电机在内的所有类型的电机也朝着相反的方向发展,升级传感器以克服前面提到的鲁棒性限制,或者在以前不使用传感器的电机类型中添加传感器。gydF4y2Ba
升级传感器的鲁棒性通常意味着远离光学传感器,否则光学传感器是正交增量编码器形式的电机位置传感的主力。因此,为了满足恶劣环境和医疗应用的需求,磁性和电容式编码器等非光学传感解决方案的使用有所增加。gydF4y2Ba
如图3所示,磁性编码器可以与电机密封隔离,通过一个小气隙测量位置。电机的转子带有一个磁性编码盘,通常安装在电机轴的末端,而编码器的电子部分使用霍尔传感器或磁阻传感技术来确定转子位置。磁性编码器从一开始就在分辨率上突飞猛进,现在可以提供每旋转1024个计数或更多的正交分辨率。gydF4y2Ba
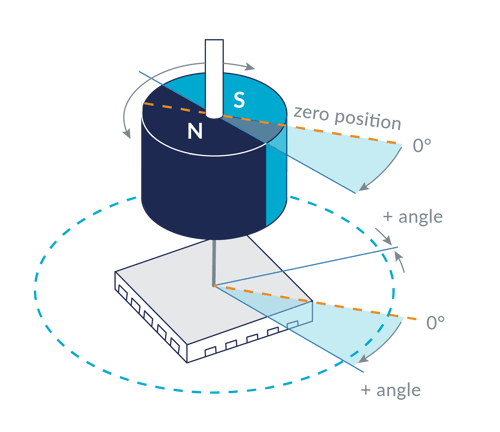
图3:磁性编码器与电机密封隔离gydF4y2Ba
电容式编码器也可以与电机密封,因此在恶劣环境和医疗应用中使用的兴趣越来越大。gydF4y2Ba
辅助采用这些新型编码器类型的是使用高精度A/ d(模数转换器)和算法技术的控制改进,以补偿编码器模拟输出信号中的小不规则性,以及快速弧tan计算以生成分辨率增强的位置值。gydF4y2Ba
真有趣,你不像步进电机gydF4y2Ba
步进电机通常不使用编码器操作,但现在正在经历一种依赖于编码器操作电机作为伺服电机的演变-基本上催生了用于定位运动应用的第四种电机类型的诞生;继无刷直流电、直流电刷和传统控制步进电机之后。gydF4y2Ba
我们将在下面更深入地研究这种技术,但这种“新”电机类型的特点是非常高的加速率,高扭矩重量,减少或消除了普通步进电机的振动问题。gydF4y2Ba
这种新方法正在推动步进电机本身的发展。例如,与闭环步进控制模式一起使用的步进电机通常采用每步3.6度的设计,而不是传统的1.8度每步配置,并且转子变得更轻,以允许更高的加速度。闭环步进器的典型应用包括线圈绕线机,纺织设备,高速拾取和放置,模具粘合等。gydF4y2Ba
当尘埃落定时,似乎我们将有两组步进电机设计,那些设计为传统上使用全步进、半步进或微步进技术而没有编码器控制的步进电机,以及那些设计为伺服控制的步进电机。gydF4y2Ba
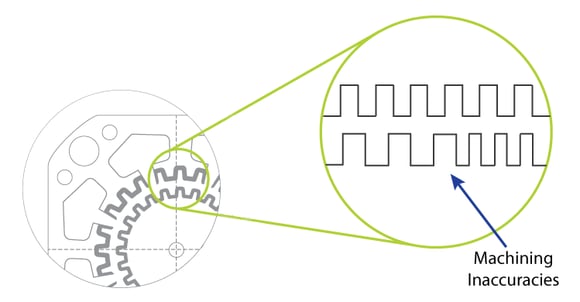
图4:步进电机加工精度gydF4y2Ba
有一个有趣的脚注,这使得闭环步进特别影响非常小的步进电机。使用传统尺寸的步进电机,如NEMA 23或NEMA 17,在运动过程中,要始终如一地保持一致的步长,并不是很难加工转子和“匹配”定子。gydF4y2Ba
如图4所示,步进电机在转子中有大量的“齿”,每个“齿”都应该与定子中相应的齿精确对齐,以获得最佳的等步运动。随着转子尺寸越来越小,小的加工误差对电机性能的相对影响也越来越大。gydF4y2Ba
闭环步进电机操作,由于其平滑这些潜在变化的能力,正成为一项重要的技术,使步进电机保持越来越小,而无需异国情调和昂贵的加工技术。gydF4y2Ba
文章继续讨论性能运动装置gydF4y2Ba网站gydF4y2Ba在这里gydF4y2Ba。gydF4y2Ba
本文的内容和观点是作者的,并不一定代表roboticstomorow的观点半岛app官网gydF4y2Ba
评论(0)gydF4y2Ba
这篇文章没有任何评论。请第一个在下面留言。gydF4y2Ba
特色产品gydF4y2Ba

