动态地加载可以定位,精度高,无振荡,尽管机械反弹和弹性组件?是的——使用一个智能系统。gydF4y2Ba
 双重循环控制:齿轮啮合间隙gydF4y2Ba
双重循环控制:齿轮啮合间隙gydF4y2Ba

Juergen Wagenbach |gydF4y2Bamaxon集团gydF4y2Ba
移动负载与电子驱动器通常是完成了一个系统,使用一个编码器在电机轴上提供控制的位置和速度信息。编码器的分辨率高,电机轴的精确检测反应动态位置控制至关重要。从应用程序的观点,然而,最终输出端负载运动的精度是至关重要的质量和产品的尺寸精度。齿轮迷、纺锤波和传动皮带有负面影响。根据齿轮啮合间隙的方向运动,可能会导致不同的加载位置在输出端。弹性可能会导致延误和振荡的启动或停止运动。想到的第一个解决方案是安装在输出轴编码器,而不是电机轴。然而,而不是成功,这导致更糟糕的系统性能。gydF4y2Ba
在与反弹或弹性机制的情况下,动态的和精确的负载定位需要使用系统的控制是基于两个编码器系统:gydF4y2Ba
- 一个旋转编码器,辅助编码器,电机轴刚性连接。这应该已经是电动机的组合的一部分。gydF4y2Ba
- 另一个编码器,编码器,主要是连接到负载输出端。gydF4y2Ba
处理来自这两个编码器信号系统,双重循环控制是必需的。maxon EPOS4定位控制器增加这种双重循环控制二阶滤波器和增益调度程序,以抵消机械共振和齿轮啮合间隙。叙事诗Studio调试软件提供了一个监管优化工具,自动确定参数复杂的控制器结构。它还阴谋驱动器的传递函数。gydF4y2Ba
控制体系结构gydF4y2Ba
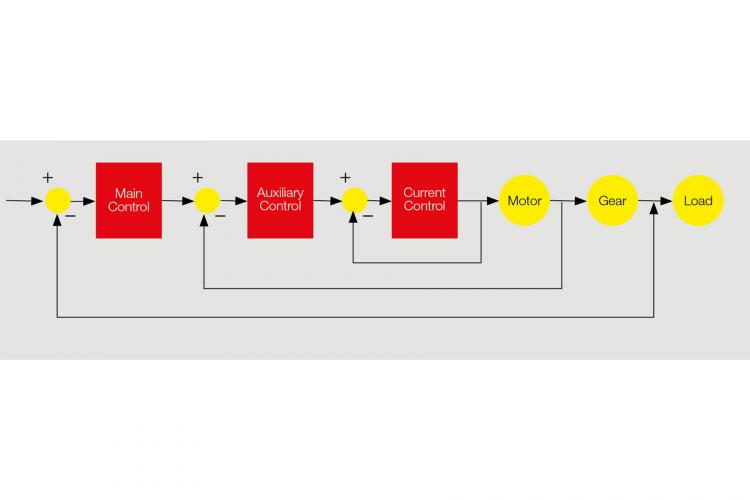
EPOS4使用双重循环控制的串级控制结构(见图1):gydF4y2Ba
- 最里面的控制回路提供电机的磁场定向控制(FOC)当前基于电动机电流作为反馈信号测量。gydF4y2Ba
- 中间控制回路(辅助控制)控制电动机转速基于电机轴上的编码器。gydF4y2Ba
- 最外层的控制回路(主要控制)控制负载的位置编码器系统基于负载。gydF4y2Ba
的详细视图EPOS4双重循环控制结构如图2所示。gydF4y2Ba
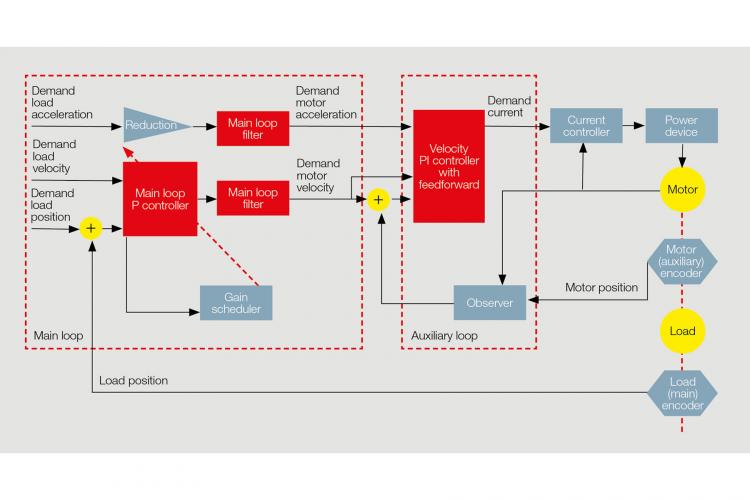
图2的所有组件的详细视图的双重循环控制系统。gydF4y2Ba
主要控制回路gydF4y2Ba
主控制回路由一个比例(P)控制器,获得调度器和二阶滤波器(主循环过滤器)。路径规划供应所需的负载的位置及其所需的速度和加速度作为输入变量的主要控制回路。另一个输入变量是当前位置的负载,以编码器。gydF4y2Ba
- 增益调度程序gydF4y2Ba
EPOS4双重循环控制使用增益调度程序从齿轮啮合间隙消除负面影响。增益调度程序通过自动调整增益的主要控制回路。如果跟踪那些偏差的实际负载位置所需的位置太大,高P将被应用,导致误差的快速减少。随着跟踪误差小,P增益降低,所以振荡不发生在开车,尽管齿轮侧隙。gydF4y2Ba
- 主循环过滤gydF4y2Ba
如果有一定数量的电机和负载之间的弹性联轴器,腰带,或长纺锤波,共振频率可能会导致放大振荡。这些可能会增加,控制变得不稳定。为了防止这种情况,EPOS4双重循环控制器采用二阶滤波器,陷波滤波器的类型。这个过滤器抑制输出信号的共振频率范围从主控制回路,从而防止谐波传动系振动。gydF4y2Ba
辅助控制回路gydF4y2Ba
辅助控制回路由一个比例积分(PI)控制器和前馈(FF),和一个观察者位置数据的估计电机转速电机编码器和电机电流测量。gydF4y2Ba
自动程序gydF4y2Ba
为了简化调试,maxon叙事诗工作室软件功能集成的自动向导来确定和验证双重循环控制器的参数。调音过程包括两个实验,自动进行。gydF4y2Ba
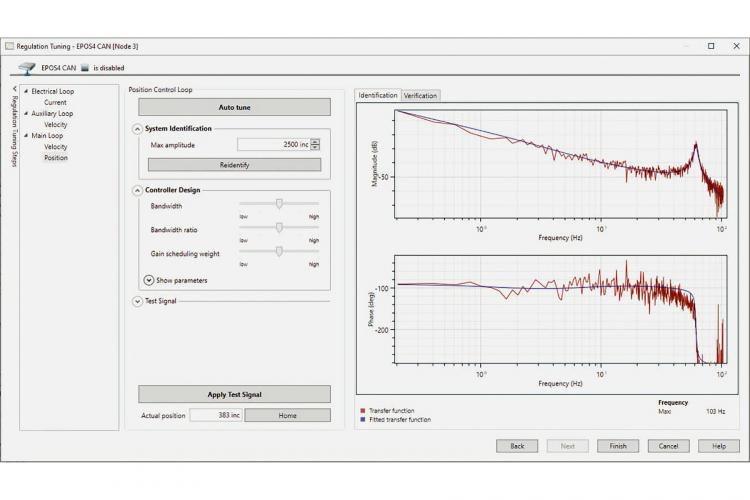
图3的例子使用EPOS4传递函数确定,与共振。gydF4y2Ba
- 实验1触发振荡电机轴。这些振荡是用来确定质量惯性,转矩常数,马达的摩擦。辅助回路控制器和观测器的参数然后计算的基础上确定的数据。gydF4y2Ba
- 实验2是用来计算的参数主要控制回路和陷波滤波器。一个伪随机位序列信号(=伪随机二进制序列)是用来激发植物。基于生成的输入-输出数据,传递函数识别和显示波德图(见图3)。gydF4y2Ba
波德图可以被导出。它协助控制技术在优化机械设计,系统分析和手动适应特定应用程序的控制。gydF4y2Ba
比较单回路控制和双重循环控制gydF4y2Ba
以下图表显示不同的参考系统的响应和跟踪误差与齿轮啮合间隙(图4)和一个系统弹性联轴节(图5)。图表比较单回路控制和负载上的编码器,并自动调整双重循环与编码器控制电机轴和负载。gydF4y2Ba
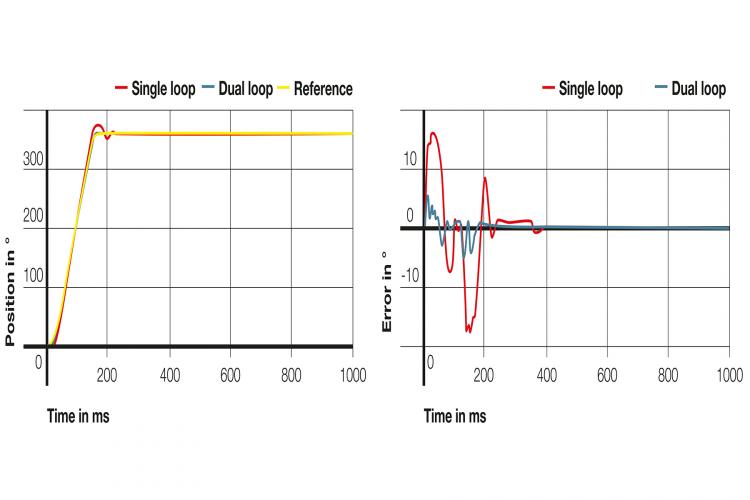
图4负载位置概要文件系统的齿轮侧隙:参考响应(上)和跟踪误差(底部)。gydF4y2Ba
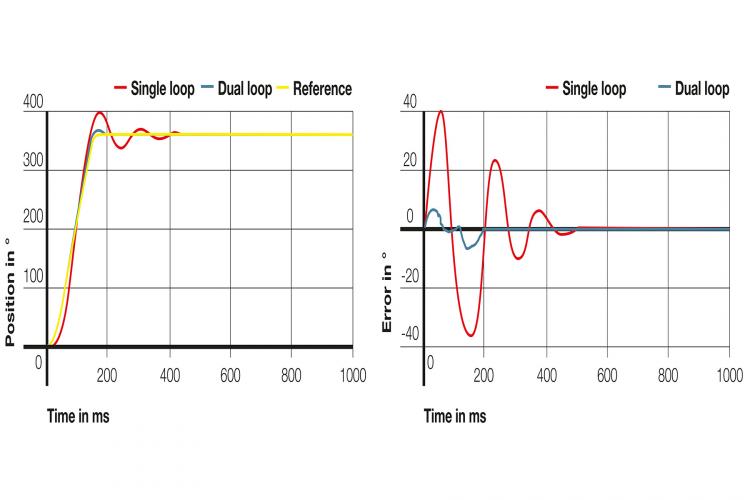
图5系统弹性负载位置的状况。参考响应(上)和跟踪误差(底部)。gydF4y2Ba
双重循环控制是一种使驱动系统更精确和更有效率。maxon不仅提供所需的所有组件,但也是一个很大的consultation-from最初的想法和经验系统设计到全面的商业生产。gydF4y2Ba
内容与本文作者的意见,不一定代表RoboticsTomorrow的观点半岛app官网gydF4y2Ba

maxon集团gydF4y2Ba
maxon领先供应商的高精度直流电刷无刷伺服电机和驱动器。这些汽车的大小范围从4 - 90 mm,可达到500瓦。我们把电动马达、齿轮和直流电机控制到高精度、智能驱动系统可定制,以适应客户的特定需求的应用程序。gydF4y2Ba
![]()
![]()
![]()
![]()
![]()
其他文章gydF4y2Ba
Mirokai,机器人技术的一场革命半岛app官网gydF4y2Ba
MiniMACS6稳定Furuta摆gydF4y2Ba
为什么自主移动小车需要可靠的汽车吗?gydF4y2Ba
更多关于maxon集团gydF4y2Ba
评论(0)gydF4y2Ba
这篇文章没有任何评论。成为第一个在下面留下你的评论。gydF4y2Ba
特色产品gydF4y2Ba

