制造商可以选择机器人夹持器,根据处理应用程序和材料,使用的类型。有四种基本类型的机器人触手:真空夹具、气动夹具、液压夹持器和servo-electric触手。gydF4y2Ba
 寻找一个机器人抓手吗?gydF4y2Ba
寻找一个机器人抓手吗?gydF4y2Ba

Len的回复中|gydF4y2Ba半岛app官网RoboticsTomorrowgydF4y2Ba
制造商可以选择机器人夹持器,根据处理应用程序和材料,使用的类型。有四种基本类型的机器人触手:真空夹具、气动夹具、液压夹持器和servo-electric触手。gydF4y2Ba
.png)
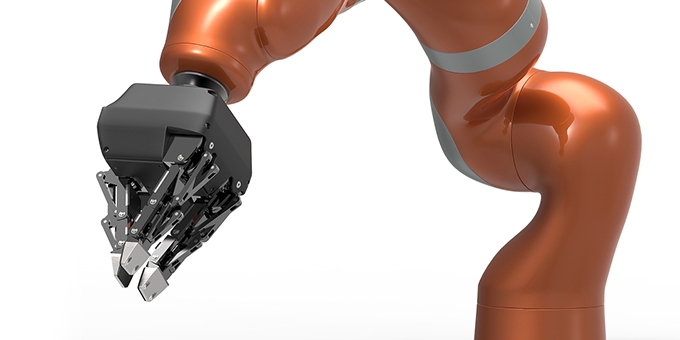
照片由杰夫格林/考虑机器人半岛app官网gydF4y2Ba
随着机器人应用程序超出了通常的高速挑选和地方,机器人的功能要求的能力选择脆弱或不规则形状的物品。叨纸牙提供位置、力量,和速度控制来完成这个任务。爪是机器人系统的一个元素。就像人类的手,爪允许持有,收紧,处理和释放的一个项目。gydF4y2Ba
 有色物品、真空夹具使用真空吸盘作为制动装置,通常认定为吸盘。当你把东西挂在一个玻璃窗口或捡起一片玻璃,你使用一个吸盘。吸盘将坚持如果正确使用相当多的力量。空气压力的力量使他们坚持一个表面。正常工作,他们需要一个杯子的形状与凹中心平面传播。他们必须坚持平坦,无孔的表面,是一种密封的材料做的。gydF4y2Ba
有色物品、真空夹具使用真空吸盘作为制动装置,通常认定为吸盘。当你把东西挂在一个玻璃窗口或捡起一片玻璃,你使用一个吸盘。吸盘将坚持如果正确使用相当多的力量。空气压力的力量使他们坚持一个表面。正常工作,他们需要一个杯子的形状与凹中心平面传播。他们必须坚持平坦,无孔的表面,是一种密封的材料做的。gydF4y2Ba
吸盘压在一个平面上,而空气困在凹区域的外压。真空是空气被迫离开时形成的。大气压力将不断试图平衡本身。因此,空气自然填充任何空缺。内部压力将吸盘的与外面的空气。因为空气不能穿透吸盘表面,它迫使杯子对平面。当空气被吸杯的边缘,或通过表面,吸密封将中断和吸盘脱落。gydF4y2Ba
气动触手有各种尺寸,下巴风格,对于大多数工业应用和扣人心弦的部队。这些触手从微型到单位,有一个沉重的夹持力。三个主要类型的气动夹具是平行的触手,角触手,和定制的触手。gydF4y2Ba
平行的触手,两张幻灯片密切平行于工件控制其外边缘,或打开墙内施加压力。平行叨纸牙是目前最常见的设计。很容易将活塞/气缸系统的力量转化为一个扣人心弦的力量因为气动触手没有汽车或齿轮。因为大部分生产设备已经压缩空气,小的努力是需要添加一个气动夹具成本最低的方式。gydF4y2Ba
成角的触手接触的工件从不同角度,如30°、40°、80°。成角的触手可以调整不同的角度较大的工件和那些奇怪的形状。当一个平行的空间太紧爪打开宽得足以容纳一个工件,可以使用一个直角爪。gydF4y2Ba
径向夹是一个版本的尖爪,可以使用垂直空间是有限的,因为他们的手指打开一个满180°。完全开放,径向的手指可以躺在或在工件和关闭的位置。gydF4y2Ba
液压夹具通常用于应用程序需要大量的力量。这些机器人触手从泵产生力量,可以提供2000 psi。有液压夹持器是气动节省成本的选择。液压执行机构的主要优点是其引人入胜的权力,这是完美的,当需要额外的夹持力,因为液压油并不是一个可压缩的介质是空气。gydF4y2Ba
气动触手有高压也许150磅每平方英寸,而液压夹具的最大额定值是750 - 2000磅每平方英寸。这个额外的扣人心弦的力把工作处理沉重的负荷。gydF4y2Ba
液压夹具成本比气动触手越来越不准确;另外,他们不适合洁净室应用程序。气动夹具是青睐,因为他们是干净、水力学相比,混乱,维护起来更加昂贵。如果扣人心弦的力量是很重要的,那么一个液压夹具的路要走。gydF4y2Ba
电触手是更好的用于测量而操纵对象,和更好的定位。如果使用一个微处理器,电子爪可以测量部分是否正确的大小和形状。这样一个系统可以确定部分太大在微秒。如果是这样,查克不会释放。电动触手的缺点是它们往往更大,因为电机,他们也可能不如气动力。gydF4y2Ba
电动触手的优势是灵活地只使用必要的最小间隙的方法部分,然后用最小中风捡起来。更大范围的大小可以选择,因为部分部分打开和关闭的能力在不影响周期时间。gydF4y2Ba
爪水平避免把其他传感器的误差分析的循环,这简化了集成,降低成本。在许多应用程序中这是非常重要的。掌控力和关闭速度可以控制,这是有用的在处理脆弱的部分。gydF4y2Ba
在洁净室环境空气泄漏可能导致污染,电动触手是唯一可行的解决方案部分。另一个好处是使用电触手而不是气动操作成本降低。gydF4y2Ba
 机器人与2手指是最简单的触手,触手最适用于许多工业用途。可以找到不同类型,如那些开放控制,压力控制,随着距离控制打开和关闭,捡起碎片,插入两根手指在一个洞。他们可以气动或电动驱动。gydF4y2Ba
机器人与2手指是最简单的触手,触手最适用于许多工业用途。可以找到不同类型,如那些开放控制,压力控制,随着距离控制打开和关闭,捡起碎片,插入两根手指在一个洞。他们可以气动或电动驱动。gydF4y2Ba
机器人叨纸牙用3的手指不习惯经常因为大多数自动化的情况下可以解决双指爪。必要的时候要拿起精致的对象以力量和准确性,三个手指触手是合适的解决方案。他们还调整好非表面用铰接的手指。gydF4y2Ba
我们将会看到机器人触手正在开发使用3 d打印技术作为行业增长。无论你的需要是什么,你可以找到一个机器人抓手来处理工作负载。gydF4y2Ba
内容与本文作者的意见,不一定代表RoboticsTomorrow的观点半岛app官网gydF4y2Ba
评论(0)gydF4y2Ba
这篇文章没有任何评论。成为第一个在下面留下你的评论。gydF4y2Ba
特色产品gydF4y2Ba

