你怎么能打印东西比打印机本身?问题研究人员徐张,明阳Li Quang-Cuong Pham,和其他人着手解决3 d打印技术中心在新加坡…gydF4y2Ba
脊背犬需要3 d印制技术更上一层楼gydF4y2Ba
克里斯Bogdon |gydF4y2BaClearpath机半岛app官网器人gydF4y2Ba
允许转载的gydF4y2BaClearpath机半岛app官网器人gydF4y2Ba:gydF4y2Ba
你怎么能打印东西比打印机本身?问题研究人员徐张,明阳Li Quang-Cuong Pham,和其他人着手解决3 d打印技术中心在新加坡南洋理工大学(南大)。gydF4y2Ba
他们的解决方案:安装一副3 d打印机gydF4y2Ba脊背犬移动机器人gydF4y2Ba一起工作,打印不同部分相同的部分。gydF4y2Ba
令人印象深刻的是,机器人工作在同一时间和重叠的工作区。事实上,gydF4y2Ba这篇论文gydF4y2Ba发表在2018年8月,标志着第一次大型混凝土结构由多个机器人同时被3 d打印!gydF4y2Ba
3 d打印机去移动gydF4y2Ba
大多数3 d打印系统缺乏可伸缩性:gydF4y2Ba
- Gantry-based系统一个笛卡尔机器人移动在一个笼子里大,效率低下。打印一个一米多结构,例如,你需要至少1立方米的笼子里。这个巨大的外部框架意味着你不能建立任何比你的系统。gydF4y2Ba
- Robot-arm-based打印机比发射更有效,但他们仍然需要很长时间才能打印任何东西,因为一个打印喷嘴还是猪整个印刷空间。gydF4y2Ba
- 多机器人系统(比如Minibuilders并不适合印刷混凝土结构,因为第一层混凝土需要变硬之前攀爬机器人可以继续打印下一节。gydF4y2Ba
正如你所看到的,在机器人手臂上安装3 d打印喷嘴并不是什么新鲜事。不同的是,研究人员安装臂本身在移动base-allowing打印喷嘴移动在一个更大的工作空间和他们想出了如何让两个机器人同时建立一个结构。gydF4y2Ba
结果是一个可伸缩的系统:一个让用户尽可能多的机器人需要介绍快速高效地完成打印任务。gydF4y2Ba
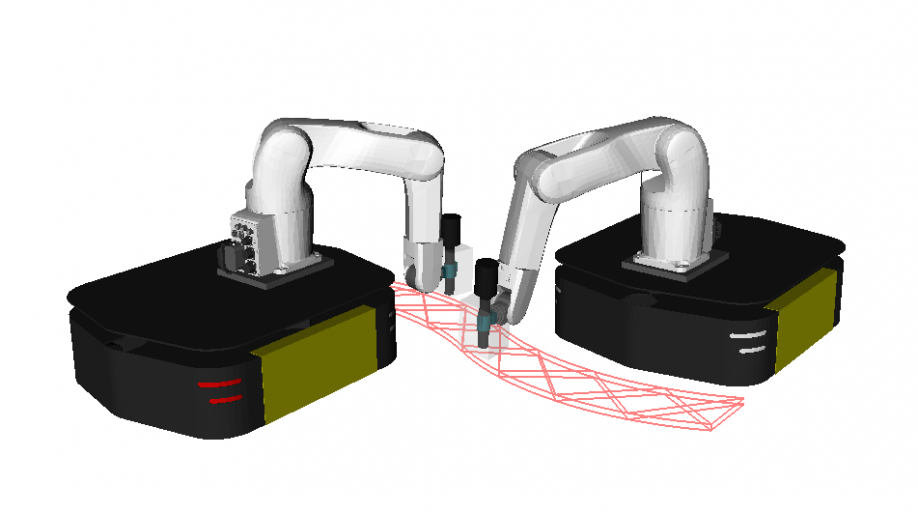
团队开始的3 d仿真Ridgeback-based机器人,规划结构的“喷嘴路径”他们想打印。gydF4y2Ba
图片来源:南大新加坡gydF4y2Ba
它是如何运作的gydF4y2Ba
团队开始的3 d模型的每个硬件组件(由制造商提供)。工作在一个CAD程序,他们计划的“喷嘴路径”结构他们想打印。这本质上是切片所需的结构层,每个代表一个路径,机器人手臂。gydF4y2Ba
接下来,他们分配了机器人结构的特定部分。在这种情况下,每个机器人负责印刷一半的结构。gydF4y2Ba
然后他们计划机器人的动作,照顾,以避免碰撞。这是一个迭代过程:团队需要建立一个运动计划,运行一个模拟,找出任何碰撞,修复计划,重新运行仿真…gydF4y2Ba
最后,他们把机器人结构松打印(见视频)。gydF4y2Ba
你可能会注意到一个男人拿着教吊坠在后台。他不是控制机械人的机器人程序,构建过程是完全自治的。他只是在那里点击“停止”,以防机器人变得疯疯癫癫,开始喷水泥墙上(幸运的是尚未发生)。gydF4y2Ba
脊背犬带领团队成功gydF4y2Ba
小组在他们的实验中用两个Clearpath脊背犬移动机器人。这些室内机器人平台为基础的机械手臂,控制器,传感器,泵系统,打印喷嘴安装。gydF4y2Ba
Quang-Cuong Pham,南大的机械和航空航天工程助理教授说,“脊背犬对我们来说是一个很好的选择,因为它高负载能力。其他移动平台只是不满足这份工作的要求。”gydF4y2Ba
他解释说,“我们的机器人手臂重50公斤,喷嘴,控制器,和所有其余的人最重要的是我们增加70公斤总每个平台。幸运的是脊背犬有100公斤有效载荷,所以我们不需要担心重载它。”gydF4y2Ba
高负载能力不是唯一的好处。该小组还喜欢脊背犬如何完整驱动,四个独立驱动,全方位的轮子。gydF4y2Ba
传统robots-on-wheels是不完整的:他们只能前后移动,而不是左右。脊背犬,相比之下,可以向各个方向移动。这使它更容易操作的精确路径。gydF4y2Ba

图片来源:南大新加坡gydF4y2Ba
接下来是什么?gydF4y2Ba
出版这篇文章之后,团队想把他们的移动打印系统到下一个水平,构建一个可以打印在移动。他们没有浪费时间,找到一个解决方案在仅仅几个月!gydF4y2Ba
到目前为止在这个博客中,我们已经讨论了系统平台仍然一动不动,而机器人手臂打印对象。但是在团队的最新方法(详细gydF4y2Ba这篇论文gydF4y2Ba),平台和印刷部门同时移动。gydF4y2Ba
看看下面的视频。gydF4y2Ba
为什么这是如此重要?因为它印刷大结构克服了巨大的障碍。与旧的固定系统,机器人只能打印区域内其手臂可能达到。建立更大的结构,您必须把多个机器人互相一起工作。gydF4y2Ba
新系统,不过,这个大小限制不再适用。因为机器人可以移动,您可以构建更大的结构只有一个机器人。gydF4y2Ba
当然,还有很多工作要做。团队想要集成多个传感器,探索更好的part-joining策略,制定多个printing-while-moving机器人运动设计的解决方案。gydF4y2Ba
他们不会停止。符合美国宇航局gydF4y2Ba3 d打印的栖息地的挑战gydF4y2Ba,他们的最终目标是创建自主建造的机器人可以在极端环境从地球上最偏远的洞穴到月球,火星,甚至更远。gydF4y2Ba
内容与本文作者的意见,不一定代表RoboticsTomorrow的观点半岛app官网gydF4y2Ba
评论(0)gydF4y2Ba
这篇文章没有任何评论。成为第一个在下面留下你的评论。gydF4y2Ba
特色产品gydF4y2Ba

