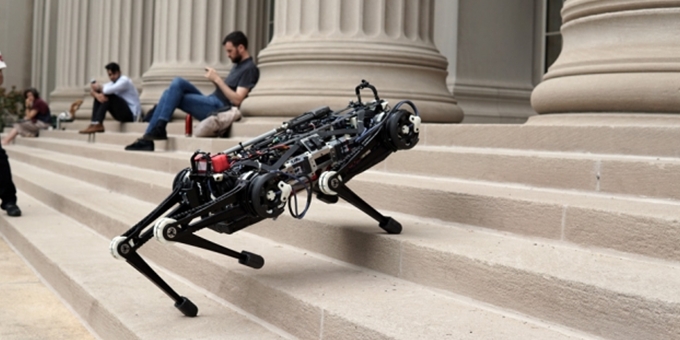
给猎豹3名开发人员,机器人,重量不到100英镑,大约是中型犬的大小和形状。它爬行的理想的解决方案是通过狭窄的空间,穿越危险的障碍和检查难以接近的区域。gydF4y2Ba
 麻省理工学院创建了一个盲目的机器人,能跑能跳gydF4y2Ba
麻省理工学院创建了一个盲目的机器人,能跑能跳gydF4y2Ba

马修斯凯拉|gydF4y2Ba生产力的字节gydF4y2Ba
麻省理工学院开发人员以项目,推动现代科技所能完成的界限,他们最近的发明也不例外。他们的最新创作,一个盲目的机器人,可以导航楼梯和无法访问或危险区域,已经被它的实用性在工厂设置和应急反应程序。gydF4y2Ba
没有视觉导航gydF4y2Ba
给猎豹3名开发人员,机器人,重量不到100英镑,大约是中型犬的大小和形状。它爬行的理想的解决方案是通过狭窄的空间,穿越危险的障碍和检查远程或难以接近的区域。gydF4y2Ba
但这不是第一次机器人已经被应用在这种能力。不仅有无人和遥控车辆已经可用,但一些无人机提供同样的功能从上空。gydF4y2Ba
是什么让猎豹3独特的功能没有愿景的能力。在机器人方面,这个特性意味着它不包括集成视频——通常用于机器人导航和检查。猎豹3依赖于多个传感器gydF4y2Ba收集数据和每一步gydF4y2Ba。信息实时处理和利用内置的人工智能(AI)访问指定的区域,避免意想不到的障碍,爬楼梯等等。gydF4y2Ba
最初的开发人员相信,他们盲目的机器人是其前任一样有效。输入视频信号受噪声和干扰,可能会导致一个不准确或不完整的画面。一些甚至可能很难与宿主保持一致的信号。gydF4y2Ba
集成摄像头他们所看到的也是有限的。大多数有一个小的视野并不总是捕捉小或附近的对象。有时候Current-g半岛app官网en机器人被阻塞或被小障碍,甚至从来没有发现。gydF4y2Ba
由高度先进的人工智能gydF4y2Ba
而不是依靠这个输入的视频信号,猎豹3使用传感器结合两个gydF4y2Ba不同形式的人工智能gydF4y2Ba:接触检测算法和模型预测控制算法。gydF4y2Ba
第一个AI-driven过程,接触检测算法,当传感器检测到一个对象中踢——无论是接触地面,固体表面、楼梯或一个障碍。机器人被设计成不同的材料有不同的反应和物质的最大效率和安全性。gydF4y2Ba
也扮演了一个角色在机器人的运动通过确定如何操纵它的四个机器人腿。人工智能编程是通过计算每条腿撞到了地上,的概率估计的力量和预期在mid-swing腿的位置。gydF4y2Ba
模型预测控制算法的步骤在促进过程的其余部分。通过预测未来机器人半秒钟的位置,根据每一个可能的力的四条腿,它可以调整需要保持平衡。猎豹3使模型预测控制算法计算每50毫秒,相当于每秒20倍。设备擅长幸存的实验室工程师的踢、推和拉。gydF4y2Ba
虽然顺利通过实验室测试,猎豹3尚未上市。开发人员将主办的官方公布猎豹3在10月gydF4y2Ba国际会议上智能机器人gydF4y2Ba在马德里,西班牙,但目前尚不清楚何时可用。gydF4y2Ba
共同努力gydF4y2Ba
虽然麻省理工学院开发人员负责项目的冲击,他们确实得到了一些帮助。组织像丰田研究所,美国空军科学研究办公室,富士康和Naver都提供他们的支持最初的研究,设计和开发的猎豹3。gydF4y2Ba
*图像通过gydF4y2Ba麻省理工学院gydF4y2Ba
内容与本文作者的意见,不一定代表RoboticsTomorrow的观点半岛app官网gydF4y2Ba
评论(0)gydF4y2Ba
这篇文章没有任何评论。成为第一个在下面留下你的评论。gydF4y2Ba
特色产品gydF4y2Ba

