惯性测量单元(IMU)是一个设备,直接测量三个线性加速度分量和三个转动组件(绑)的车辆。gydF4y2Ba
 7的原因你的生活取决于准确的IMU(惯性测量单元)无人驾驶汽车gydF4y2Ba
7的原因你的生活取决于准确的IMU(惯性测量单元)无人驾驶汽车gydF4y2Ba

麦克霍顿|gydF4y2BaACEINNAgydF4y2Ba
惯性测量单元(IMU)是一个设备,直接测量三个线性加速度分量和三个转动组件(绑)的车辆。IMU的传感器通常是独一无二的发现在一个自治车辆因为IMU不需要连接或外部世界的知识。gydF4y2Ba
无人驾驶汽车需要许多不同的技术,例如,激光雷达来创建一个精确的三维图像的局部环境,雷达测距目标使用不同的电磁频谱的一部分,摄像头读取信号和检测颜色,高清地图定位等等。与乌兹别克斯坦伊斯兰运动不同的是,这些技术包括外部环境提供数据本地化的软件栈,感知和控制。这种独特的gydF4y2Ba“独立”gydF4y2BaIMU的属性,使得它的核心技术gydF4y2Ba安全性和融合。gydF4y2Ba
.png)
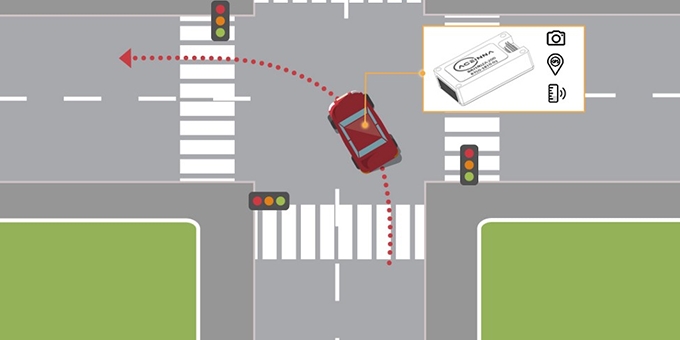
一个精确的用红色IMU可以缓解问题gydF4y2Ba
7最主要的原因有下面的列表只是一个开始,欢迎更多的理由和一个精确的IMU的好处是对这篇文章的反应。gydF4y2Ba
# 1安全第一gydF4y2Ba
系统工程师需要考虑每个场景,总是有一个备份计划。故障模式影响分析(FMEA)正式这个需求到设计要求风险降低。FMEA会问如果激光雷达,雷达和摄像机同时失败吗?IMU dead-reckon可以很短的时间,这意味着它可以确定完整的立场和态度gydF4y2Ba独立gydF4y2Ba一会儿。IMU孤独可以减缓车辆控制的方式,把它停止…提供最佳实践的结果在一个糟糕的情况下。虽然这可能看起来像一个不自然的要求,这是一个基本的一个成熟的安全方法。gydF4y2Ba
# 2良好的态度gydF4y2Ba
一个精确的IMU可以精确确定和跟踪的态度。我们经常把一辆车的位置或位置,但开车时方向或标题同样是至关重要的。开车有点错误的方向甚至一个短暂的瞬间,会让你在错误的车道上。动态控制车辆需要传感器的动态响应,和一个精确的IMU跟踪动态工作态度和准确位置的变化。由于其完全独立的自然环境,甚至一个IMU可以追踪真正棘手的情况下如下滑和轮胎打滑,失去牵引力。精确的态度测量通常是有用的一个输入到其他算法。虽然激光雷达和摄像机可以是有用的在决定态度,GPS通常是相当无用。最后,一个稳定的独立态度参考价值在校准和对齐。gydF4y2Ba
# 3车道保持准确gydF4y2Ba
原来人类并不是分心或喝醉了时,我们通常不坏在开车。典型的司机可以容纳他们的立场在车道比10厘米。这是真的紧张。如果一个自治车辆车道游荡,那么它将似乎是一个糟糕的司机。期间作为一个例子,可怜的车道保持很容易导致事故。乌兹别克斯坦伊斯兰运动是一个关键的动态传感器引导车辆动态,此外乌兹别克斯坦伊斯兰运动可以保持比30厘米精度水平在短时间内(10秒)当其他传感器离线。算法中使用的IMU也可以交叉比较多种方法来确定位置/位置,然后分配一个确定性的整体定位估计。甚至没有IMU,也许不可能知道从激光雷达位置误差时的解决方案已经退化。gydF4y2Ba
.jpg)
期间,一个精确的IMU在车道保持起着关键作用gydF4y2Ba
# 4激光雷达仍然是昂贵的gydF4y2Ba
特斯拉而闻名gydF4y2Ba“不需要激光雷达”gydF4y2Ba自动驾驶仪的技术方法。如果你没有激光雷达,IMU甚至更为重要,因为基于摄像头定位精度低的车辆将会更频繁的时期仅仅取决于相机场景或外部照明条件。基于摄像机定位使用“gydF4y2Ba筛选gydF4y2Ba”功能跟踪捕获的图像中计算的态度。如果相机没有立体声(通常情况下)惯性IMU数据本身也是一个数学计算的核心部分的立场和态度。gydF4y2Ba
# 5计算不是免费的gydF4y2Ba
高精度激光雷达和高清地图的强大的组合是最先进的核心四级无人驾驶方法如被克鲁斯和Waymo测试。在这些系统中激光雷达扫描实时匹配到高清地图使用卷积信号处理技术。基于匹配,车辆和态度是估计的精确位置。这个过程是计算昂贵。尽管我们都愿意相信的成本计算项都很小,在车辆只是并不便宜。更精确地算法知道其初始位置和态度,所需要的更少的计算计算出最佳匹配。此外,通过使用IMU数据,风险算法陷入局部最小值的高清地图数据减少。gydF4y2Ba
# 6 GPS / INS:制作高精度GPS的工作gydF4y2Ba
在今天的生产车辆GPS系统使用低成本的单频接收机。这使得车辆GPS精度相当无用的自动化。然而,低成本的多频GPS的路上从几个硅供应商。这即将到来的硅,基于网络的修正等解决方案gydF4y2BaRTKgydF4y2Ba和gydF4y2Ba购买力平价gydF4y2Ba可以提供GPS修复在理想条件下厘米级精度。然而,这些解决方案对环境非常敏感,如桥梁、树木和建筑物。已是不争的方式来克服这一挑战,提高精度GPS可靠性是使用高精度IMU帮助在一个低级别的位置的解决方案。这样的GPS / INS技术包括紧密耦合和ultra-tightly-coupled GPS / INS。这些都是即将推出的汽车市场gydF4y2Ba(敬请期待激动人心的更新)gydF4y2Ba。gydF4y2Ba
# 7辆车已经需要一个IMUgydF4y2Ba
证明生产汽车已经IMU的1/3到一个完整的IMU。车辆稳定性系统严重依赖侧x - y和z轴陀螺加速度计。展期检测依赖于陀螺安装敏感轴方向上的旅行。这些传感器的车辆安全系统十多年了。唯一的问题是,传感器精度通常过低是之前使用的六个用例。所以为什么不升级的车辆高精度IMU和帮助自行驾驶吗?gydF4y2Ba主要障碍是成本。gydF4y2Ba
AceinnagydF4y2Ba随着业内其他公司正在努力消除成本障碍。办理登机手续,gydF4y2BaAceinnagydF4y2Ba了解其最新产品的低成本、精度艾莫斯的负担得起的自治。gydF4y2Ba
(1).jpg)
Aceinna性价比的艾莫斯正推动边界gydF4y2Ba
内容与本文作者的意见,不一定代表RoboticsTomorrow的观点半岛app官网gydF4y2Ba
评论(0)gydF4y2Ba
这篇文章没有任何评论。成为第一个在下面留下你的评论。gydF4y2Ba
特色产品gydF4y2Ba

