每个企业主需要知道背后的技术自主移动机器人gydF4y2Ba
 自动化的内部交通gydF4y2Ba
自动化的内部交通gydF4y2Ba

由|gydF4y2Ba米尔gydF4y2Ba
几乎任何规模的企业,在几乎每一个行业想要自动化来提高竞争力和员工的安全。生产过程自动化,是早期目标和具有成本效益的发展,安全,easy-todeploy协作使这种类型的自动化机器人快速甚至对中小型企业(smb)。在看到从这些技术的快速和大量的投资回报,企业领导人正在寻求其他浪费的过程自动化在他们的组织。gydF4y2Ba
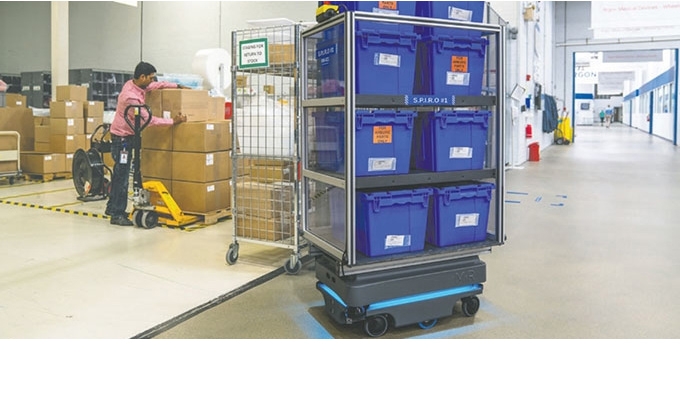
主要目标是材料运输。在制造业,甚至是高度自动化的工厂仍在使用熟练工人手工推手推车提供零部件和系统从一个过程到另一个。在其他行业,如酒店和医疗、工人花宝贵的时间移动的垃圾,床单,衣服,或食物,而不是迎合客人的病人,或居民。gydF4y2Ba
过去,自动引导车辆(agv)是自动化内部交通的唯一选择,但这些需要昂贵,固定安装,通常使用永久性的痕迹或传感器嵌入到大型工厂的地板。今天的自主移动机器人(amr)提供非凡的灵活性,成本效益和安全,改变材料运输以同样的方式协作机器人手臂改变了制造业。gydF4y2Ba
但amr是不一样的。企业主需要了解这些工具背后的技术为了做出最好的决定为他们的特定需求。amr从移动工业机器人(MiR)集成一组关键的技术,设置这些机器人除了竞争对手和企业主提供巨大的优势在一些关键领域,包括易用性、灵活性、安全性、和投资回报率(ROI)。gydF4y2Ba

易用性和灵活性gydF4y2Ba
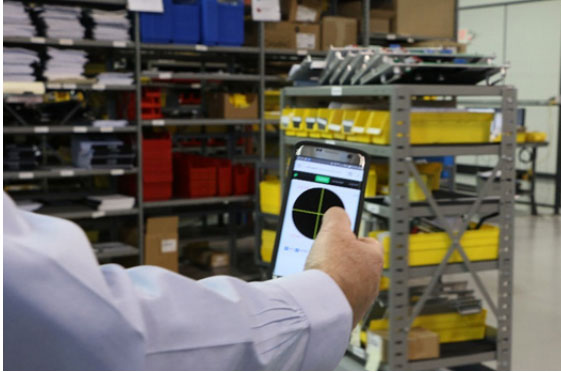
amr的最大优点之一是如何快速,容易和便宜,他们可以设置程序,使用。米尔机器人,新客户可以驱动机器人的盒子使用Wi-Fi-connected智能手机,平板电脑,或者电脑,并让它运行基本路线在不到一个小时。映射机器人的设施很简单,下载一个CAD文件或通过手动“驾驶”AMR建筑使用机器人的基于web的软件构建一个映射。gydF4y2Ba
米尔机器人的直观用户界面允许员工设置机器人和创建任务路线没有任何编程经验。他们可以很容易地创建禁区的机器人,机器人上下坡道,机器人程序激活室内门和电梯。这种易用性米尔机器人的灵活性的基础。机器人的任务可以很容易地更新,地图可以改变以匹配其生产布局的变化——通常在几分钟内。用户界面可以针对个人定制概要文件来指定每个用户的访问和控制水平。机器人也有一个全功能的REST API,允许技术用户利用标准协议与现有的ERP系统集成机器人。让机器人工作在一个完全自动化的生产环境中ERP系统召唤机器人当它是必要的。当使用多个机器人和MiRFleet软件,100机器人可以管理和优先工作基于位置和可用性。gydF4y2Ba
额外的灵活性与米尔开源的方法来实现,它允许企业定制机器人最大的几乎任何模块使用。所有米尔机器人移动平台设计为标准安装孔。常见的顶级模块如搁置或储物箱可以很容易地构建和安装内部。高层模块的其他选项包括输送带、协作机器人手臂,电梯,或者的一台洗碗机了MiRHook自动检索和拖曳的车重的载荷。客户可以选择正确的机器人为每个预算和有效载荷要求,从MiR100可以携带100公斤/ 220磅,拖到300公斤/ 660磅,MiR200,可以携带200公斤/ 440磅,拖到500公斤/ 1100磅。gydF4y2Ba

机器人用于几乎任何工作环境。防静电和无尘室认证(MiR200机器人),也是理想的专业生产环境(如电子、食品和饮料,或医疗设备。gydF4y2Ba
对于企业主来说,这ROI的易用性和灵活性是一个至关重要的方面。机器人需要没有外部援助部署计划,并重新部署随着业务需求的变化。客户充分的所有权的机器人,可以很容易地测试新的试点项目,改变模块和任务,适应路线获得尽可能高的回报他们最初的投资。在大多数情况下,投资回收期为米尔机器人通常是不到一年的时间。gydF4y2Ba

米尔移动机器人确保灵活性Kamstrup期间的经济增长gydF4y2Ba
Kamstrup,智能电表的主要制造商,经历了大幅增长与全球关注能源效率和可持续性。Kamstrup米尔机器人集成到其ERP系统,确保最大生产能力利用率。机器人安装输送带,可以自动传递和接收物品在每个生产单元,并运行不间断每天24小时,每周5天。机器人的灵活性允许Kamstrup快速适应其high-mix highvolume生产和发布等重要任务的员工发展和产生新的原型。gydF4y2Ba

安全性和导航gydF4y2Ba
amr和自主移动小车的一个关键区别是他们安全地导航能力的人们和障碍。自主移动小车必须遵循一个固定的“跟踪”(如磁条或电线嵌在地板上),不能偏离这条路线。如果人或对象块跟踪、自主移动小车必须停止,等待他们才可以继续移动。amr,然而,使用传感器和软件几乎以相同的方式作出反应,汽车导航系统响应的弯路。因为机器人最初设定的地图,它可以很容易地备份或改变路线绕过障碍和有效地完成其使命。gydF4y2Ba
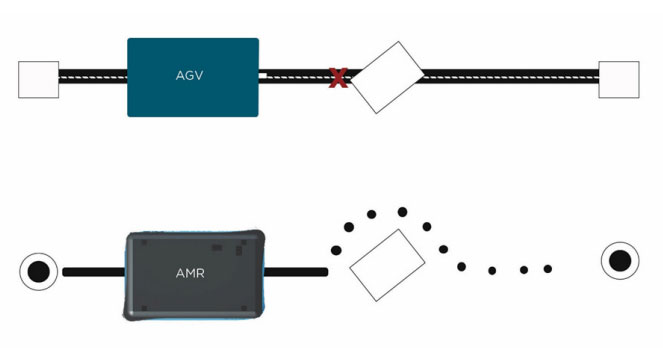
amr可以安全地绕开障碍物和人民,与自主移动小车必须等待一个障碍清除其轨道gydF4y2Ba
米尔机器人包括两个ISO 13849 -激光扫描仪,以满足认证类别3 D安全标准性能水平。两个激光器放置在正面和背面的机器人提供了一个360度的视野。这dual-laser方法允许机器人能够安全地备份如果它遇到一个障碍不能操作,检测人从背后接近或从侧面并根据需要调整其课程。保护区域的机器人是机器人的速度的依赖。这允许机器人安全,慢慢开车非常接近障碍,它会自动停止,如果一个人在几厘米或障碍。但激光扫描仪只有一部分的米尔机器人的综合安全性和导航系统。gydF4y2Ba

米尔机器人使用一个独特的,dual-laser安全系统提供360度的视野gydF4y2Ba
附加的导航提供的援助是一个3 d相机安装在机器人的前面来检测障碍物提前2米,从5厘米到80厘米从地板上。高级相机也可以被添加到机器人探测障碍高1.8米。这允许机器人安全地操作表,例如,上面是激光扫描仪的视野但短于机器人的高度最大的模块,如高货架单位或者机器人手臂。其他障碍,如安装在墙上的柜子、架子或饮水器也可以避免。gydF4y2Ba

3 d相机提供了额外的安全功能通过检测障碍高1.8米。gydF4y2Ba
完整的多传感器安全系统tehnology集成到米尔机器人还提供明显比其他amr流畅的导航,机器人可以完成其任务更快更可靠,因为它不需要停止对光发生障碍时。额外的传感器感知惯性力包括加速度计和陀螺仪,加速度,和旋转;在每个轮子编码器测量速度和准确反馈激光扫描仪。安全激光扫描仪,3 d相机,和额外的继电器和plc传输数据到一个复杂的规划算法,决定机器人是否应该调整其课程或一个安全的和立即停止以避免碰撞。机器人也可以轻松编程优化导航和安全。机器人的地图,禁止区可以简单地通过使用智能手机的触摸屏或表。其他指令,如定义首选路径或限制机器人的速度在高流量区域容易编程。gydF4y2Ba
当工人通常是最舒适当机器人不超过他们的步行速度,机器人可以安全地提高到5.4公里/分钟如果需要,可以便于长距离之间停止点。机器人包括一个独特的光栏各方提供颜色线索沟通地位工人,和声音cues-including哔哔声,角,或任何所需的MP3或WAV文件可以很容易编程。gydF4y2Ba
米尔机器人导航霍尼韦尔的多层安全设施gydF4y2Ba
霍尼韦尔分析产生气体探测设备在一个91000平方米的工厂与仓库和生产在不同的楼层。米尔是唯一可用的移动机器人,机器人可以自动控制电梯,以及安全策略通过狭窄的走廊和防火门的两倍。选择软件允许机器人中使用蓝牙接口自动打开防火门,电梯PLC控制和接口。机器人已经释放相当于六个全职员工的高价值的任务,和公司计划与amr更加自动化。gydF4y2Ba

结论gydF4y2Ba
一些商业决策可以没有深刻的理解背后的技术工具,特别是如果这些工具必须集成和管理的专业人员。但是今天的机器人具有易用半岛app官网性,安全性和灵活性,允许业务完整的所有权和快速ROI的好处。企业主需要了解的技术,使有效的比较和实现最好的方法为他们的特定需求。gydF4y2Ba
内容与本文作者的意见,不一定代表RoboticsTomorrow的观点半岛app官网gydF4y2Ba
评论(0)gydF4y2Ba
这篇文章没有任何评论。成为第一个在下面留下你的评论。gydF4y2Ba
特色产品gydF4y2Ba

